روشهای اندازه گیری موقعیت و سرعت موتور
در این مقاله به بررسی روشهای اندازه گیری موقعیت و سرعت موتور می پردازیم. موقعیت و سرعت موتور را با سه وسیله می توان اندازه گیری کرد:
-
استفاده از تاکو ژنراتور (Tacho-Generator)
-
استفاده از انکودر (Encoder)
-
استفاده از تحلیلگر (Resolver)
در این مقاله پس از معرفی هر یک از این وسایل،به مزیت ها و محدودیت های آنها اشاره خواهیم کرد.
تاکو ژنراتور (Tacho-Generator):
شکل یک تاکو ژنراتور را در زیر می توانید ببینید:
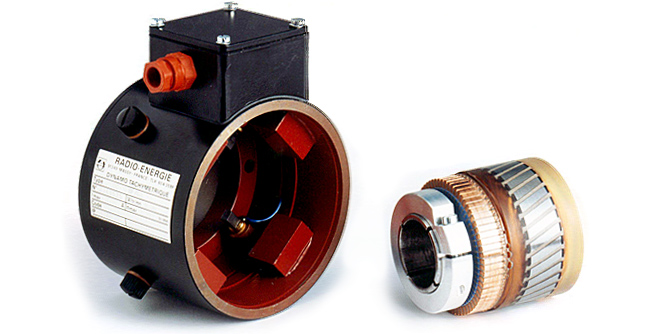
تاکو ژنراتور در اصل همان ژنراتور DC با آهنربا می باشد.همان طور که می دانید ولتاژ خروجی این ژنراتور متناسب با سرعت چرخش آن است و معمولا ضریب آن بصورت چندولت بر 1000دور بیان می شود.سادگی، مقاومت مکانیکی و همچنین اندازه گیری مستقیم سرعت بدون نیاز به محاسبات از مزایای این وسیله می باشد. سیگنال خروجی تاکو ژنراتور دارای ریپل و همچنین حساس به نویز می باشد و با تغییر دما (حساسیت آهنربا به دما) خروجی نیز در سرعت ثابت تغییر می کند.بنابر این قیمت زیاد،دقت محدود و استهلاک زیاد کاربرد این وسیله را محدود کرده است.
انکودر (Encoder):
امروزه انکودرهای دیجیتال بطور وسیعی مورد استفاده قرار می گیرند.انکودرها قطار پالسی تولید می کنند که متناسب با سرعت است.انکودرها را میتوان به دو دسته انکودر مطلق (Absolute) و انکودر افزایشی (Incremental) تقسیم بندی کرد.در شکل زیر انواع انکودر را مشاهده می کنید:
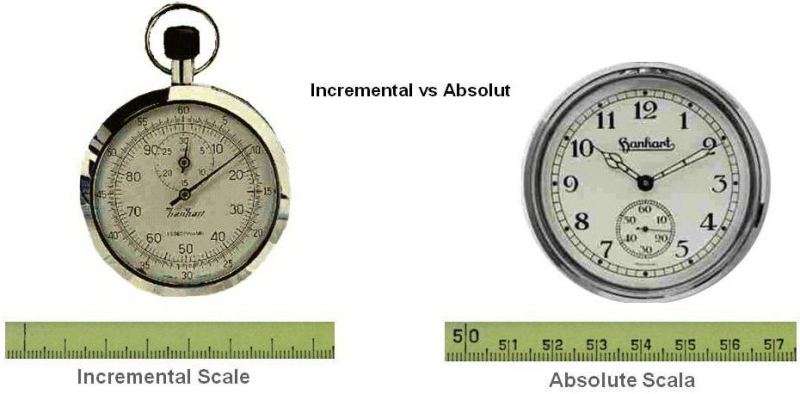
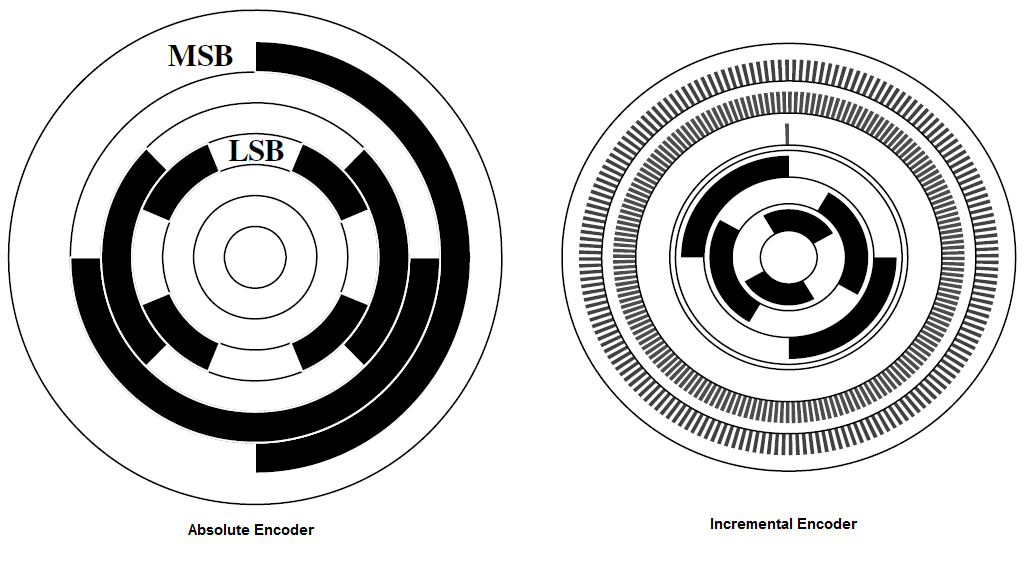 همانطور که مشخص است انکودر افزایشی سرعت را مشخص می کند ولی انکودر مطلق علاوه بر سرعت مکان روتور را نیز مشخص می کند.تفاوت این دو انکودر را می توان با شکل زیر توضیح داد:
همانطور که مشخص است انکودر افزایشی سرعت را مشخص می کند ولی انکودر مطلق علاوه بر سرعت مکان روتور را نیز مشخص می کند.تفاوت این دو انکودر را می توان با شکل زیر توضیح داد:
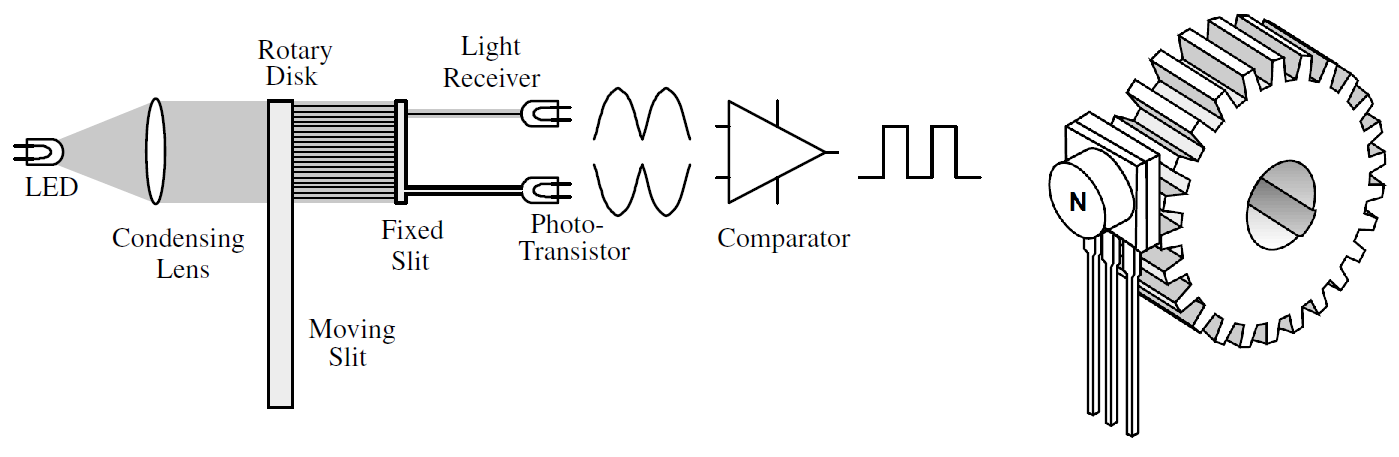
 انکودر افزایشی بر حسب اصول عملیاتی به دو صورت تقسیم بندی می شود:
انکودر افزایشی بر حسب اصول عملیاتی به دو صورت تقسیم بندی می شود:
-
حسگر نوری
-
حسگر مغناطیسی
معمولا ماکزیمم تعداد پالس بر دور حسگر مغناطیسی کمتر از حسگر نوری می باشد ولی هزینه و مقاومت در برابر شرایط محیطی آن بیشتر از حسگر نوری می باشد.در جاهایی که هزینه حرف اول را می زند مانند:حمل ونقل و وسایل خانگی معمولا از حسگر مغناطیسی استفاده می شود و در جاهایی که کارایی مهم می باشد از حسگر نوری استفاده می شود.شکل زیر حسگر نوری و مغناطیسی را نشان می دهد:
 انکودر مطلق برای هر نقطه از روتور یک کد منحصربفرد تولید می کند که می تواند بصورت باینری یا گری باشد.با استفاده از انکودر مطلق در صورت قطع برق موقعیت محور مشخص است.با استفاده از نرم افزار زیر می توانید انواع انکودر را رسم و سپس پرینت کرده استفاده کنید.
انکودر مطلق برای هر نقطه از روتور یک کد منحصربفرد تولید می کند که می تواند بصورت باینری یا گری باشد.با استفاده از انکودر مطلق در صورت قطع برق موقعیت محور مشخص است.با استفاده از نرم افزار زیر می توانید انواع انکودر را رسم و سپس پرینت کرده استفاده کنید.
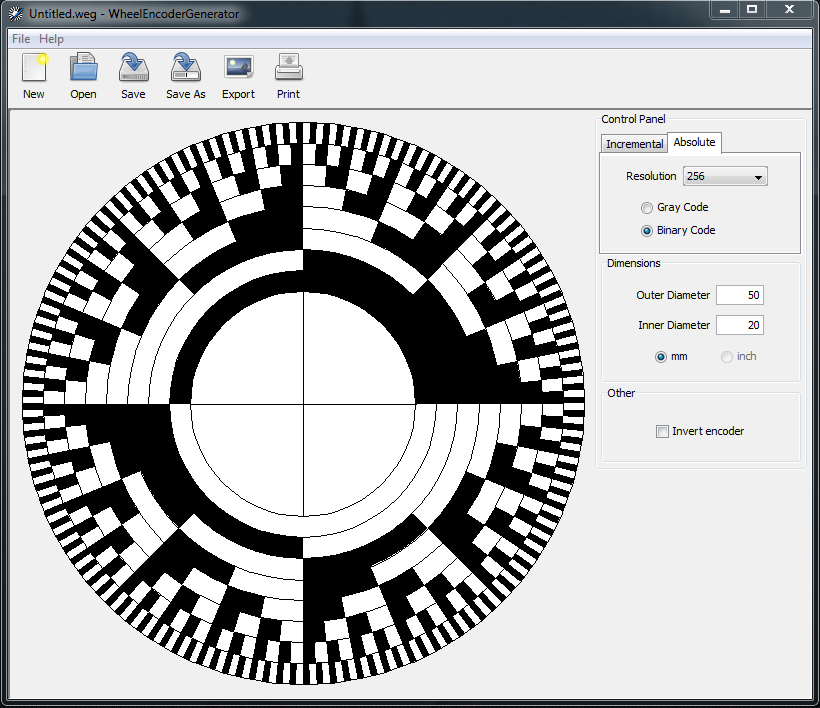
دانلود نرم افزار Wheel Encoder Generator
تحلیلگر (Resolver):
تحلیلگر در اصل یک ماشین سنکرون رلوکتانسی می باشد که مقدار رلوکتانس آن تابعی از زاویه روتور است.شکل زیر ساختار تحلیلگر را نشان می دهد:
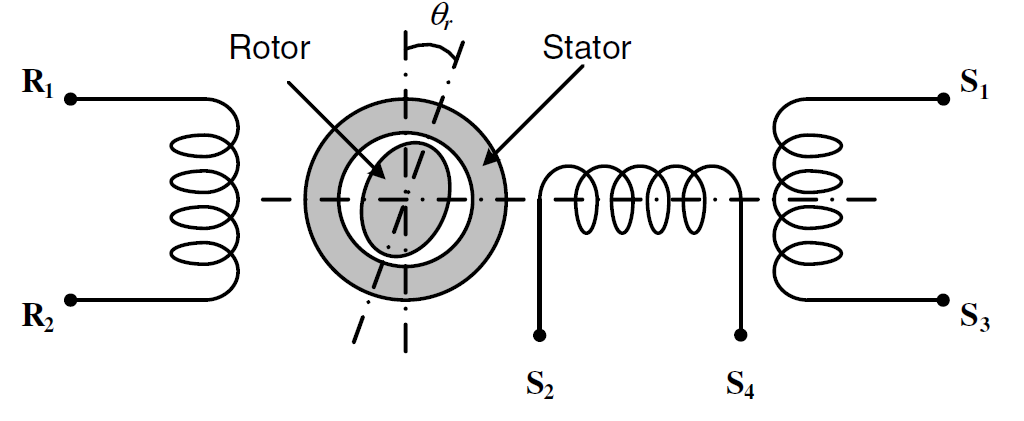 همانگونه که مشخص است تحلیلگر از سه سیم پیچی تشکیل شده است.سیم پیچی R1-R2 با ولتاژ ثابت AC تغذیه می شود.دو سیم پیچ دیگر با یکدیگر 90 درجه اختلاف دارند که برای مشخص کردن زاویه استفاده می شوند.اگر ولتاژ سیم پیچی R1-R2 بصورت زیر تغذیه شود ولتاژ دو سیم پیچ دیگر بصورت زیر خواهد بود:
همانگونه که مشخص است تحلیلگر از سه سیم پیچی تشکیل شده است.سیم پیچی R1-R2 با ولتاژ ثابت AC تغذیه می شود.دو سیم پیچ دیگر با یکدیگر 90 درجه اختلاف دارند که برای مشخص کردن زاویه استفاده می شوند.اگر ولتاژ سیم پیچی R1-R2 بصورت زیر تغذیه شود ولتاژ دو سیم پیچ دیگر بصورت زیر خواهد بود:
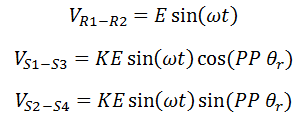
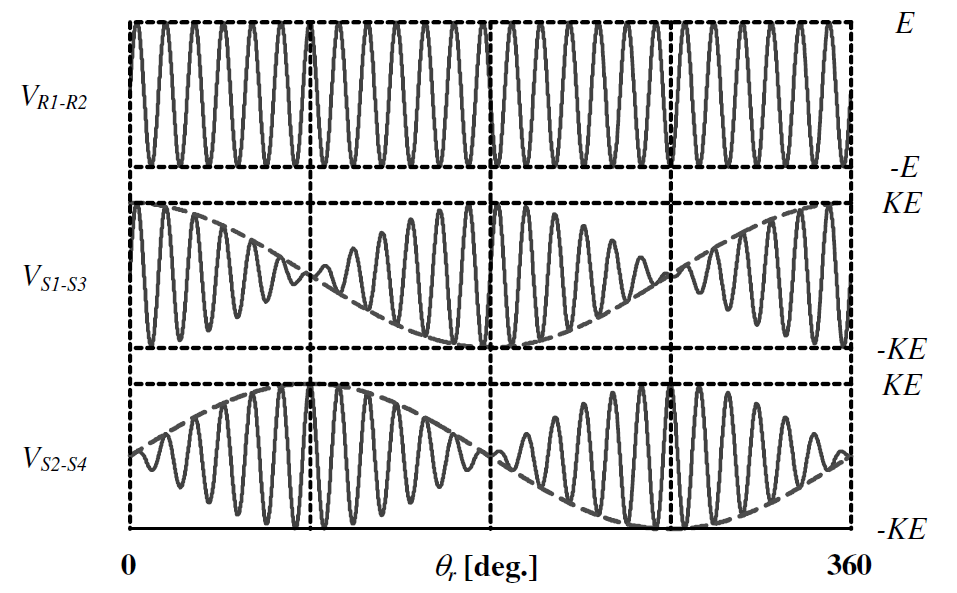
که K نسبت سیم پیچی ورودی و خروجی و PP تعداد زوج قطب تحلیلگر است.شکل موج های خروجی بصورت زیر است:
 تحلیلگر یک حسگر زاویه ی مطلق است و در مقابل انکودر مطلق ارزان تر و مقاوم تر است.عیب مهم آن کم بودن دقت و تفکیک پذیری آن است.
تحلیلگر یک حسگر زاویه ی مطلق است و در مقابل انکودر مطلق ارزان تر و مقاوم تر است.عیب مهم آن کم بودن دقت و تفکیک پذیری آن است.




No Comments