روش های محاسبه سرعت بوسیله انکودر افزایشی (Incremental)
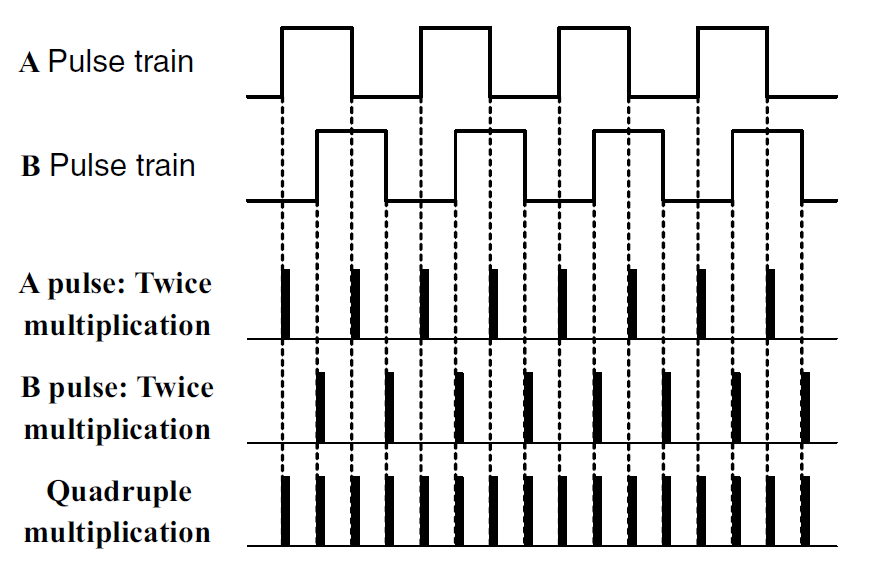
در مورد انکودر افزایشی سرعت باید بوسیله ی قطار پالس تخمین زده شود.همان گونه که می دانید با افزابش تعداد پالس بر دور (Pulse per Revolution) کنترل کننده باید پهنای باند بیشتری داشته باشد و همچنین انکودر نسبت به شوک های مکانیکی حساس تر می شود.از شکل زیر مشخص است که اگر شمارش پالس ها بر اساس بالا و پایین رفتن لبه سیگنال A و B باشد مقدار PPR چهار برابر می شود که باعث افزایش خطای اندازه گیری می شود.
سرعت بوسیله قطار پالس
سه روش های مختلفی که در صنعت بصورت وسیع برای محاسبه ی سرعت بوسیله قطار پالس بکار می روند عبارت اند از:
-
روش M
-
روش T
-
روش M/T
روش M:
شکل این روش مانند زیر است:
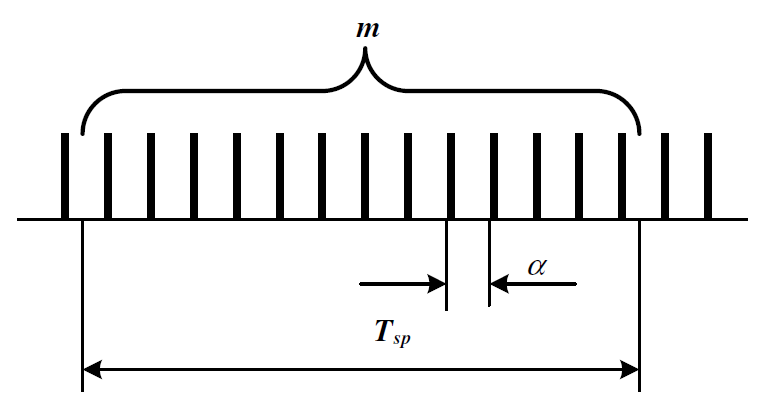
در این روش تعداد پالس ها در یک زمان وقفه ثابت شمارش می شوند.سرعت در این روش با فرمول زیر محاسبه می شود:
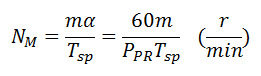
که m تعداد پالس ها، a زاویه مکانیکی بین دو پالس و Tsp زمان نمونه گیری است.
این روش مزیت هایی از جمله سادگی اجرا و ثابت بودن زمان نمونه گیری در هر سرعتی را داراست.خطای سرعت طبق رابطه ی زیر ثابت است:
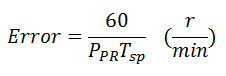
همچنین در سرعت های پایین،اندازه گیری سرعت با این روش دارای دقت خوبی نمی باشد.
روش T:
همان طور که در شکل زیر مشخص است در این روش زمان بین دو پالس کنار هم اندازه گیری می شود:
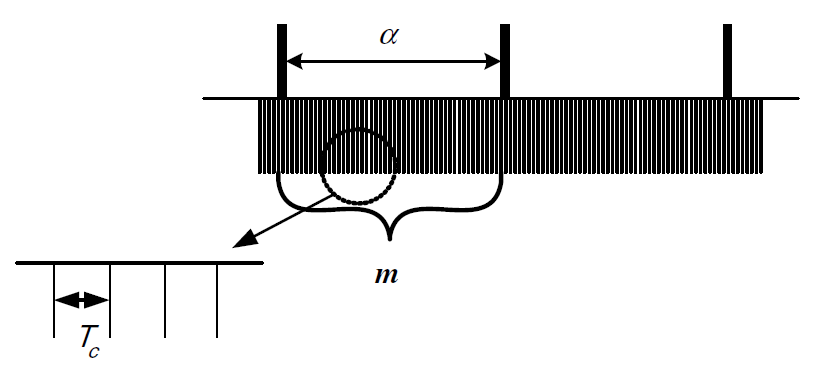
سرعت در این روش بوسیله فرمول زیر محاسبه می شود:
که fc فرکانس کلاک قطار پالس است.
مزیت این روش اندازه گیری دقیق در سرعت خیلی پایین می باشد.اما چون زمان نمونه گیری بر اساس سرعت تغییر می کند ممکن است تاخیر در سیستم ایجاد گردد.
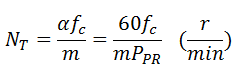
روش M/T:
در صنعت از ترکیب دو روش بالا بصورت گسترده استفاده می شود.این روش مزیت هر دو روش بالا را دارا می باشد.اصل این روش را در شکل زیر می توانید ببینید:
سرعت در این روش بوسیله ی فرمول زیر محاسبه می شود:
در این روش اندازه گیری سرعت در سرعت های پایین (روش T) و در سرعت های زیاد (روش M) دقیق می باشد.
رزولوشن اندازه گیری سرعت بوسیله رابطه زیر محاسبه می شود:
منحنی این تابع برای مقادیر زیر از سرعت 3r/min تا 500r/min در زیر نشان داده شده است:
Fc=30MHz,PPR=1000,Tc=1ms
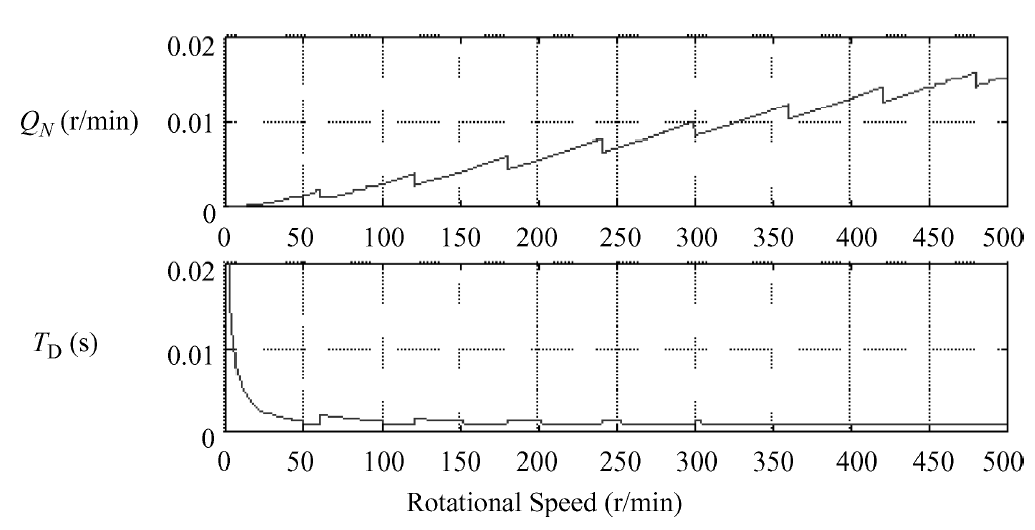
همان گونه که از شکل پیدا است با افزایش سرعت رزولوشن بدتر می شود ولی رزولوشن نسبی که بصورت QN/NM/Tتعریف می شود ثابت می ماند.




18 Comments
آتنا
درباره8 سال agoسلام. وقت بخیر. من میخوام یه انکدر بخرم. میشه راهنمایی بفرمایید، موتور القایی موجود 2860rpm سرعت داره و می خوام با یه دیتالاگر 100 کیلوهرتز نمونه برداری کنم. انکدر مناسب باید چند پالس در یک دور باشه؟
پاسخAdmin
درباره8 سال agoآیا نیاز به اندازه گیری سرعت دارید و یا زاویه را نیز باید اندازه گیری کنید؟
پاسخعلی
درباره8 سال agoبا سلام واسه کنترل موقعیت یک سروو موتور از چه چیزی باید برای گرفتن یدبک لازم دارم؟
پاسخAdmin
درباره8 سال agoمعمولا خود سرو موتورها دارای فیدبک داخلی هستند.
پاسخm
درباره8 سال agoسلام چطور میشه با انکودر 400 پالسی، فاصله رو به سرعت تبدیل کرد با دقت بالا؟
پاسخAdmin
درباره8 سال agoبا خود انکودر می شود سرعت را اندازه گیری نمود و نیازی به تبدیل فاصله به سرعت نیست.
پاسخm
درباره8 سال agoمن میخام با شفت انکودر فاصله عمودی را اندازه بگیرم و به سرعت خطی تبدیل کنم. آیا امکانش هست؟
پاسخAdmin
درباره8 سال agoانکودر زاویه و سرعت را اندازه گیری میکند نه فاصله را. شما می توانید تعداد پالس ها را در یک مدت زمان مشخص اندازه گیری کنید و سپس با استفاده از روابط موجود در این پست سرعت زاویه ای را محاسبه کنید.
پاسخm
درباره8 سال agoیعنی نمیتونم سرعت زاویه ای را با دادن برنامه به میکروکنترلر به سرعت خطی تبدیل کنم؟ با انتقال حرکت شفت انکودر به پینیون و از پینیون به دنده نواری
Admin
درباره8 سال agoبا محاسبه شعاع شفت انکودر و ضرب آن در سرعت زاویه ای سرعت خطی محاسبه می شود:
v=rw
m
درباره8 سال agoمیشه لطفا منبع این مطلبی که نوشتین رو بگین؟
پاسخAdmin
درباره8 سال agoمنبع کتاب Control of Electric Machine Drive Systems - Seung-Ki Sul است.
پاسخhosseinkh
درباره6 سال agoسلام و خسته نباشین انکودر همون لوپ دیتکتوره یا فرق میکنه؟
پاسخAdmin
درباره6 سال agoانکودر برای اندازه گیری زاویه و سرعت موتور استفاده می شود و از اساس با لوپ دتکتور فرق دارد.
پاسخُِسیروان
درباره6 سال agoبسیار متن عالی بود خلاصه کامل و دقیقا نیاز صنعتی من رو رفع کرد فقط یه سوال میمونه بین روشهای M و T شرط انتخاب چی هست من شنیدم که شرط 60Ppr به عنوان حد بین این دو در نظر گرفته شده است.
پاسخAdmin
درباره6 سال agoهمونطور که خودتون هم اشاره کردید به سرعت موتور و تعداد پالس انکودر وابسته است.
پاسخmkoura
درباره6 سال agoسلام خسته نباشین.اقا چطور میشه با انکودر زاویه رو حساب کرد؟
پاسخAdmin
درباره6 سال agoباید از انکودر مطلق استفاده کنید.
پاسخ