تنظیم کنترل کننده جریان موتور القایی
همانند ماشین های DC برای موتورهای AC که نیاز به کنترل دقیق دارند کنترل کننده جریان لازم می باشد. چندین روش برای کنترل کننده جریان ماشین های AC پیشنهاد شده است مانند: کنترل کننده هیسترزیس، کنترل کننده پیش بین (predictive regulator)، کنترل کننده Dead Beat و …
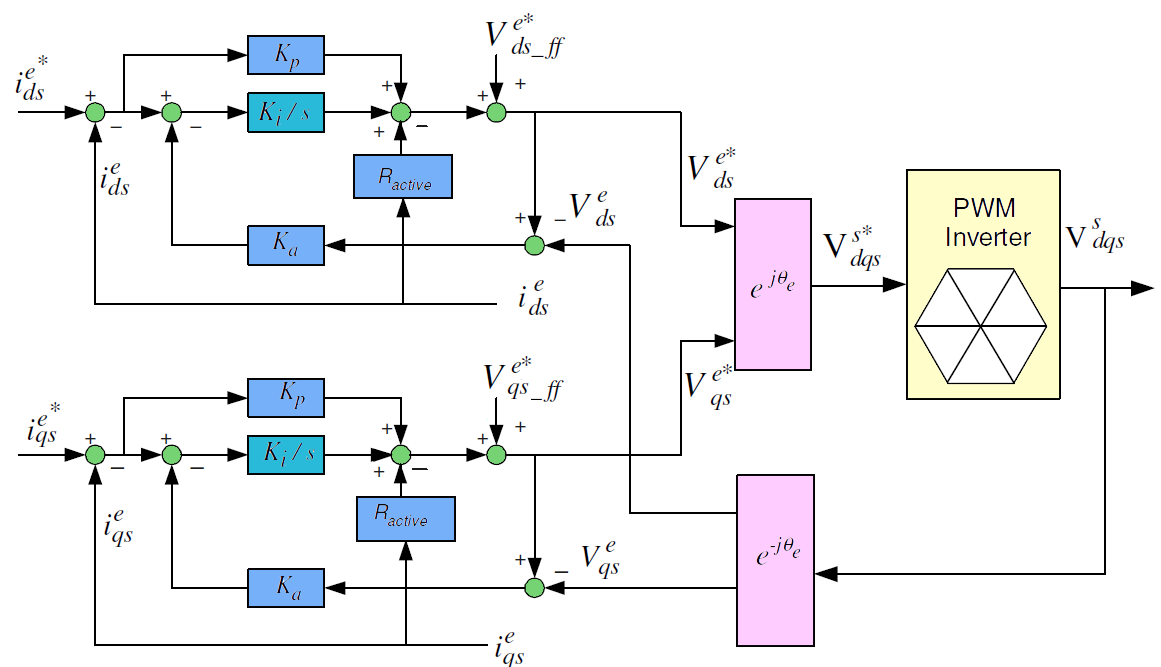
در این قسمت بر اساس قسمت قبل که نحوه تنظیم کنترل کننده PI جریان برای موتور DC شرح داده شد می خواهیم نحوه تنظیم کنترل کننده جریان را برای موتورهای AC توضیح دهیم بطوری که کنترل کننده در مقابل تغییرات پارامترهای ماشین AC مقاوم باشد.