تنظیم کنترل کننده جریان موتور DC
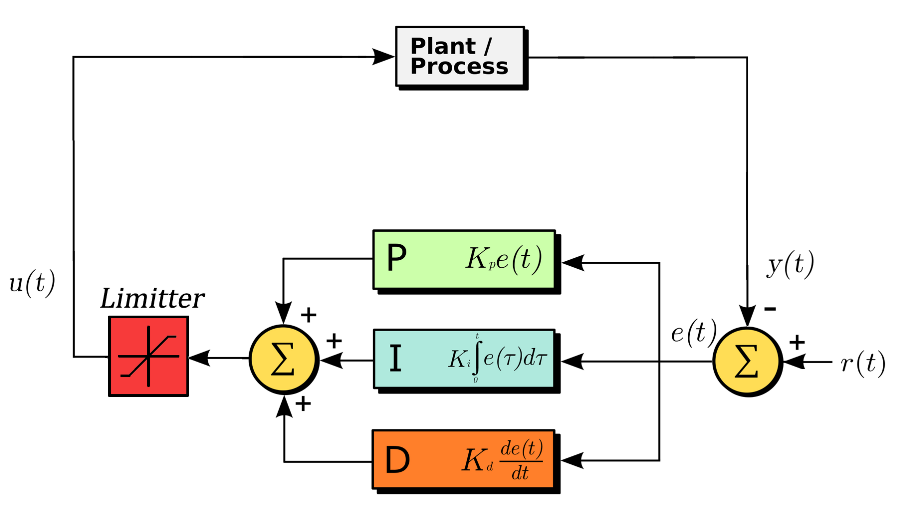
در این مقاله به تنظیم کنترل کننده جریان موتور DC می پردازیم. در سیستم های پیچیده معمولاً یک حلقه کنترلی جوابگوی نیازهای کنترلی نمی باشد یا حتی ممکن است نتواند پایداری را تضمین کند. به همین علت از چند حلقه کنترلی تودرتو استفاده می شود. برای مثال در کنترل موتورهای الکتریکی معمولاً از سه حلقه استفاده می شود. شکل زیر بلوک دیاگرام کنترلی کلی موتورهای الکتریکی را نشان می دهد: