اشباع کنترل کننده ها
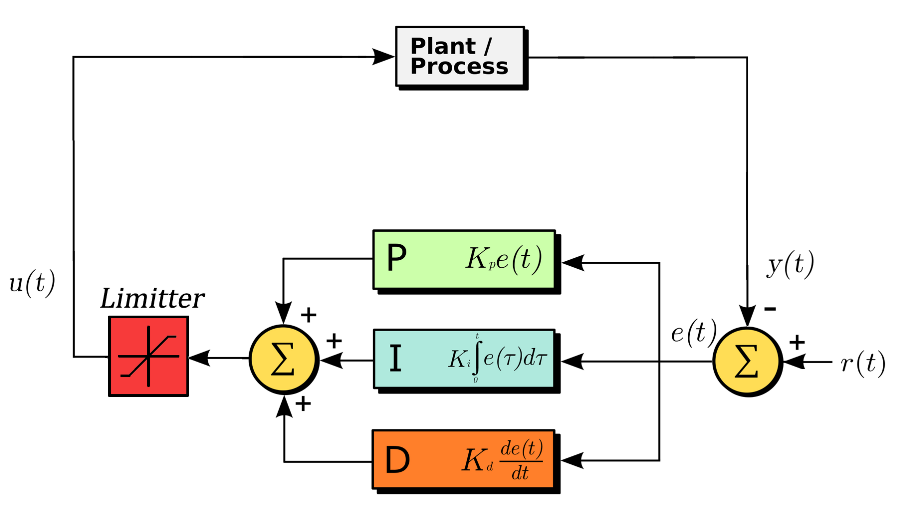
در بیشتر فرآیندهای صنعتی نباید مقادیر پارامترهای سیستم بیشتر از مقادیر نامی شوند و پارامترها دارای حد بالا یا پایین یا به اصطلاح دارای اشباع می باشند. برای مثال در یک موتور اگر مقدار جریان موتور بیشتر از مقدار نامی شود باعث می شود که سیم پیچی موتور بسوزد. از آنجایی که گشتاور موتور با جریان آن رابطه مستقیمی دارد پس باید در کنترل موتور مقدار گشتاور را محدود به گشتاور نامی موتور کرد. چون مقدار گشتاور نتيجه خروجی كنترل كننده (PID) سرعت می باشد پس باید برای اعمال محدودیت گشتاور، مقدار خروجی کنترل کننده باید محدود شود. برای محدود سازی کنترل کننده می توان از مدار ساده زیر استفاده کرد: