طراحی کنترل کننده با تولباکس Matlab (بخش دوم)
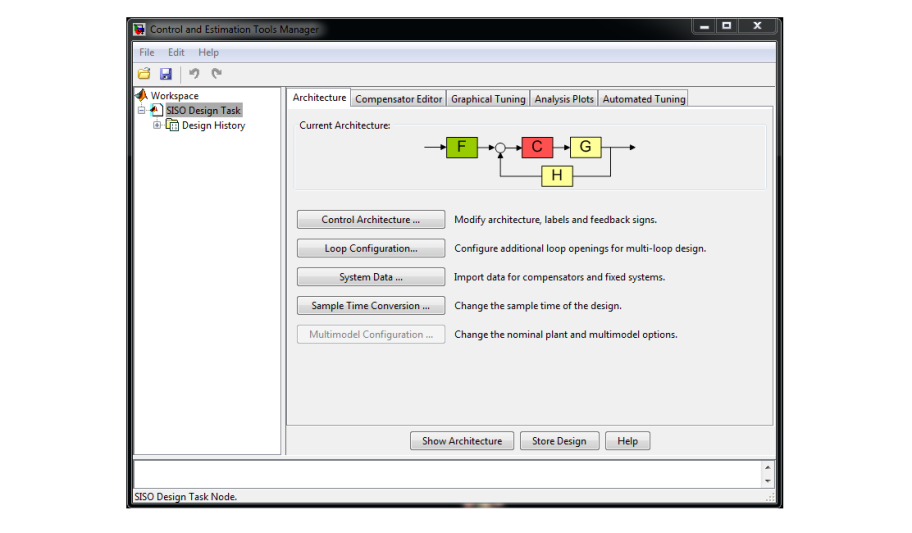
در قسمت قبل نحوه ایجاد ساختار یک سیستم کنترلی را با تولباکس Control System Tuning شرح دادیم. معمولاً یکی از مهمترین مشکلات در مورد کنترل کننده ها نحوه تنظیم کنترل کننده می باشد زیرا با تنظیم نامناسب کنترل کننده ممکن است سیستم ناپایدار شود. برای حل این مشکل از محیط تنظیم اتوماتیک (Automated Tuning) کمک می گیریم.
برای تنظیم کردن کنترل کننده 5 روش زیر وجود دارد: