نحوه تنظیم کنترل کننده PI موتورهای DC
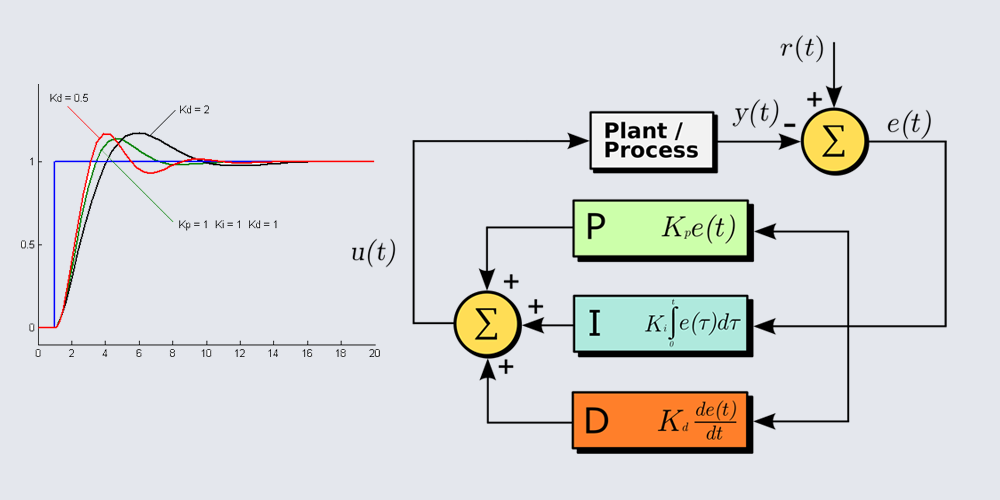
در قسمت قبل بلوک کنترلی ماشین DC توضیح داده شد. مشکل کنترل حلقه باز، تغییر سرعت موتور با تغییرات بار یا ولتاژ منبع می باشد بنابراین به سراغ کنترل حلقه بسته می رویم. از جمله کنترل کننده های حلقه بسته کنترل کننده PID می باشد. مسئله مهم در این کنترل کننده ها نحوه تنظیم ضرایب کنترل کننده های PID می باشد بطوری که هم سرعت پاسخ دهی افزایش یابد و هم مقدار فراجهش کاهش یابد. برای ورود به این بحث با توجه به شکل زیر ابتدا باید تعاریف کنترلی زیر را در نظر بگیریم:
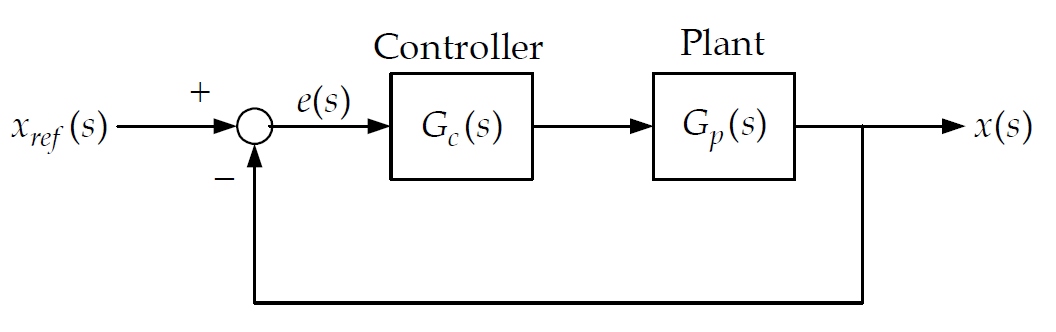
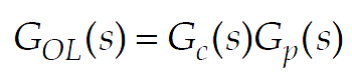
تابع انتقال حلقه باز:
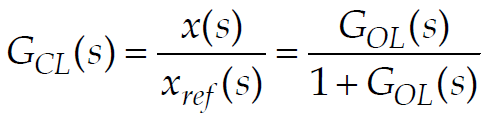
تابع انتقال حلقه بسته:
فرکانس قطع صفر دسی بل:
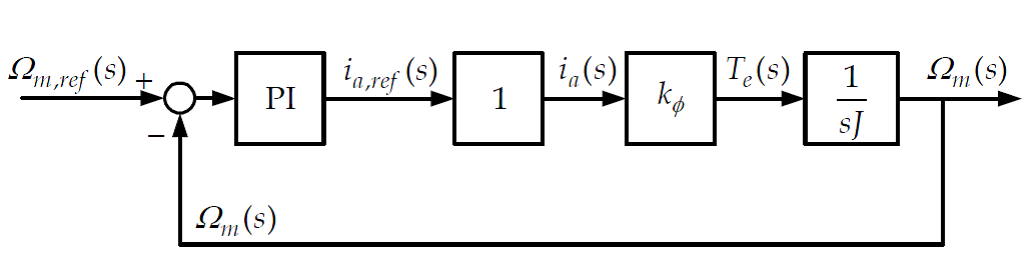
بلوک کنترلی متوالی ماشین DC بصورت زیر می باشد:
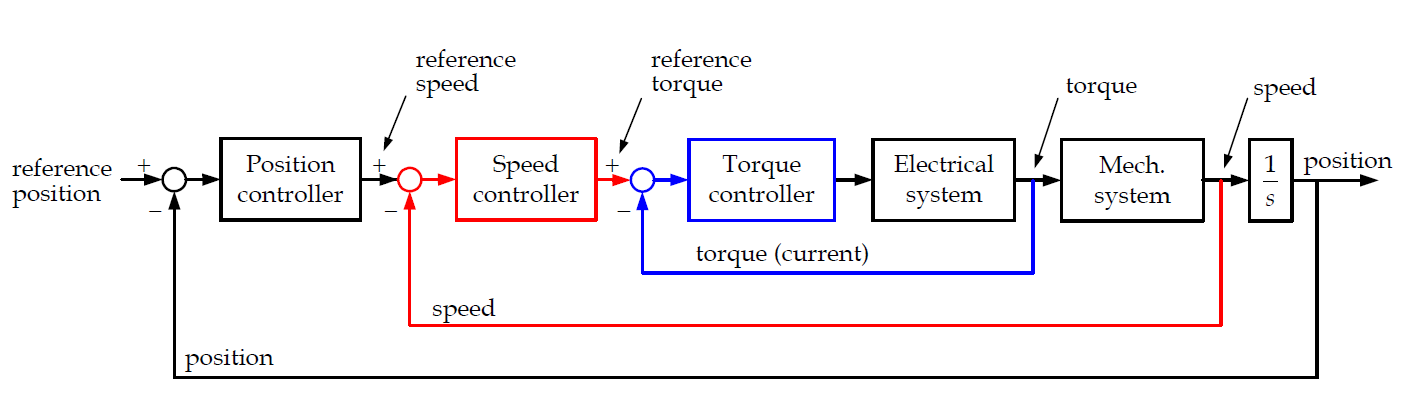
همان طور که مشخص است این بلوک دارای سه حلقه کنترلی می باشد که باید سرعت پاسخ دهی حلقه داخلی حدود 5 الی 10 برابر حلقه بیرونی باشد. بنابراین باید سرعت حلقه کنترل گشتاور(جریان) بیشتر از سرعت حلقه کنترل سرعت و بیشتر از حلقه کنترل موقعیت باشد.
با توجه به مطالب گفته شده، برای تنظیم کنترل کننده PI سه مرحله داریم:
- تنظیم کنترل کننده ی حلقه گشتاور
- تنظیم کنترل کننده ی حلقه سرعت با ایده آل در نظر گرفتن حلقه گشتاور
- تنظیم کنترل کننده ی حلقه موقعیت با ایده آل در نظر گرفتن حلقه سرعت
تنظیم حلقه گشتاور:
با صرف نظر کردن از اصطکاک می توان حلقه گشتاور را بصورت زیر در نظر گرفت:
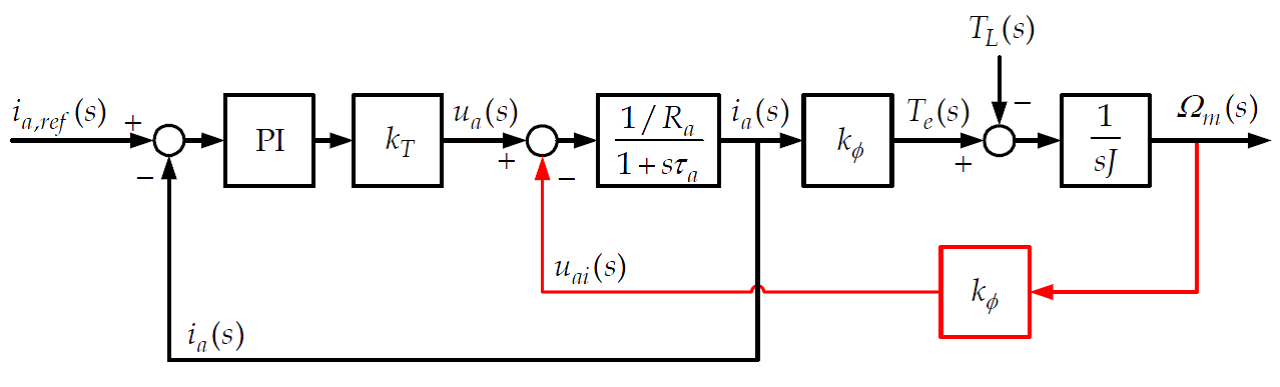
توجه کنید مقدار KT مربوط به بهره چاپر با فرکانس بالا می باشد و از تاخیر چاپر صرف نظر شده است. همچنین چون مقدار اینرسی به اندازه کافی بزرگ است می توان حلقه گشتاور را بصورت زیر در نظر گرفت:
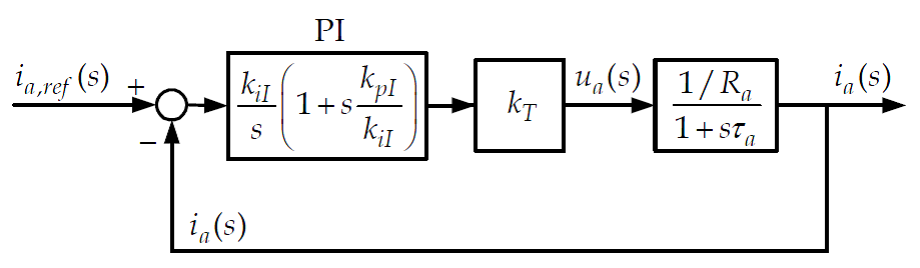
پس تابع تبدیل حلقه باز بصورت زیر می باشد:
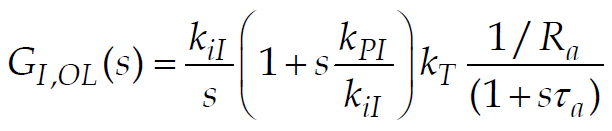
صفر کنترل کننده PI را طوری در نظر می گیریم که قطب موتور را حذف کند:

مقدار ωcI بر اساس فرکانس چاپر مشخص می شود پس مقدار kiI را بر اساس فرکانس قطع صفر دسی بل ωcI می توان انتخاب کرد:

تنظیم حلقه سرعت:
با ایده آل در نظر کردن حلقه گشتاور می توان حلقه سرعت را بصورت زیر در نظر گرفت:
پس تابع تبدیل حلقه باز بصورت زیر می باشد:
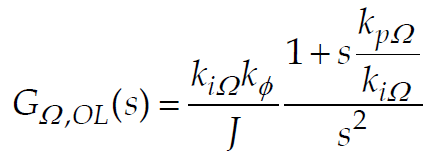
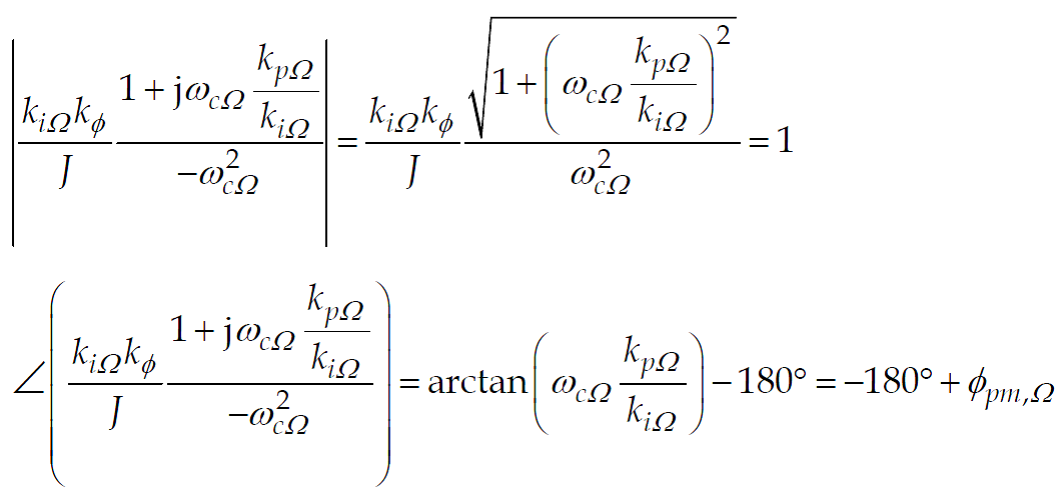
چون سرعت حلقه سرعت باید کمتر از حلقه گشتاور باشد پس مقدار فرکانس قطع صفر دسی بل ωcΩ را کمتر از ωcI با حد فاز φpmΩ حدود 60 درجه در نظر می گیریم پس داریم:

تنظیم حلقه موقعیت:
با ایده آل در نظر کردن حلقه سرعت می توان حلقه موقعیت را بصورت زیر در نظر گرفت:
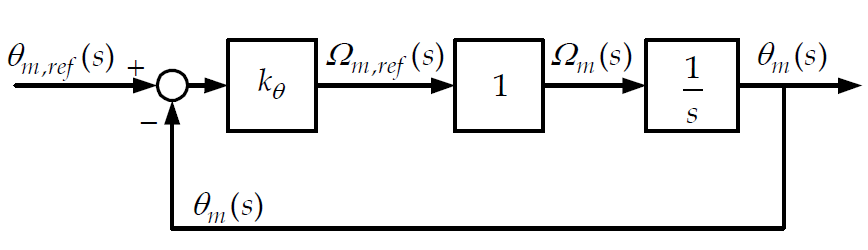
پس تابع تبدیل حلقه باز بصورت زیر می باشد:
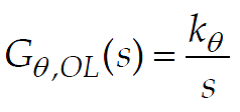
توجه کنید که کنترل کننده تناسبی به تنهایی نیاز ما را رفع می کند. با انتخاب فرکانس قطع صفر دسی بل ωcθ داریم:

توجه کنید چون ترم مشتق گیر نسبت به نویز حساس بوده و معمولاً سنسور اندازه گیری سرعت و موقعیت نیز دارای نویز می باشد از قسمت مشتق گیر کنترل کننده PID در این قسمت صرف نظر شده است.
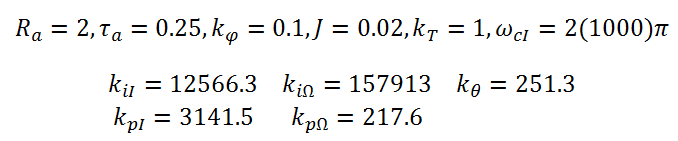
مثال:
با فرض فرکانس 1000 هرتر برای چاپر و مقادیر زیر برای ماشین DC ضرایب کنترل کننده ها بصورت زیر محاسبه می شود:
 برای دانلود فایل شبیه سازی بر روی عکس زیر کلیک کنید.
برای دانلود فایل شبیه سازی بر روی عکس زیر کلیک کنید.




7 Comments
jamshid
درباره10 سال agoآقا خیلی کارت درسته. خسته نباشید
پاسخسهیلا
درباره9 سال agoسلام..ممنون از زحماتتون من وقتی اجرا میکنم سیمولینک رو خطا میده...برای ورودی سرعتش خطا میده ممنون میشم راهنماییم کنید با تشکر
پاسخAdmin
درباره9 سال agoاین فایل با نسخه 2012b شبیه سازی شده است و مشکلی ندارد. خودتان می توانید بلوک زاویه مرجع را با بلوک های دیگر درست ایجاد نمایید.
پاسخmehdi
درباره8 سال agoسلام خسته نباشید. شبیه سازی کنترل دور موتور dc با pid به چه روشی باید انجامش بدم
پاسخAdmin
درباره8 سال agoمنظورتون از روش چیه؟ روش تنظیم کنترل کننده یا روش شبیه سازی ؟
پاسخshahnazi
درباره7 سال agoسلام ممنون از مطلب خوبتون. یه سوال داشتم. این 1/s که در بلوک دیاگرام دوم ( بلوک کنترلی متوالی ماشین DC بصورت زیر می باشد:) گذاشتید، برای چی هست؟ به چه کار میاد؟ ممنون از سایت خوبتون
پاسخAdmin
درباره7 سال agoاگر نیاز به کنترل زاویه باشد باید از سرعت موتور انتگرال گرفته شود و کار این 1/s همین است.
پاسخ