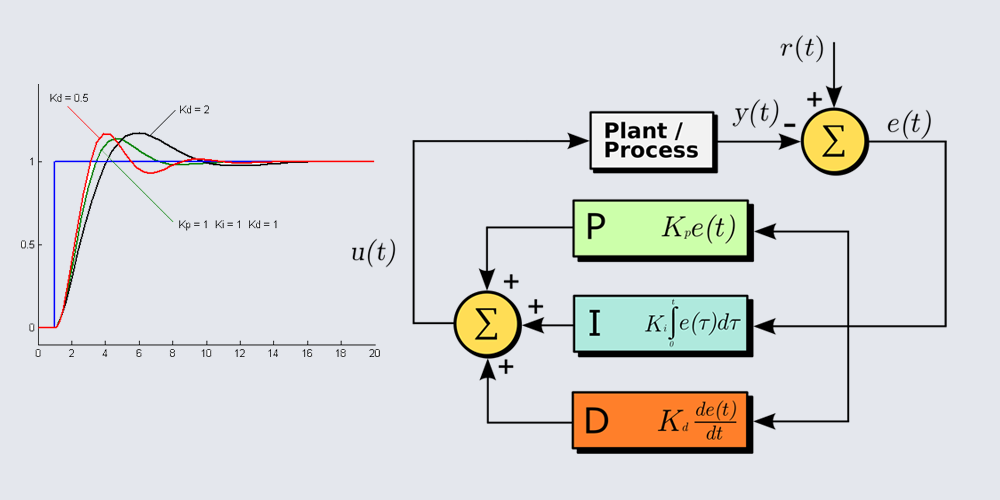
کنترل کننده PID دیجیتال
در كنترل كننده هاي مدرن صنعتي و همچنين بلوكهاي PID مربوط به PLC های مختلف صنعتي اين كنترل كننده بصورت ديجيتال پياده سازي مي شود. البته قدرت پياده سازي ميكروپروسسوري به كنترل كننده PID محدود نشده و انواع ديگر كنترل كننده هاي خطي و غيرخطي را مي توان توسط ميكروپروسسور پياده سازي نمود.در اينجا بصورت مقدماتي مباحث گسسته سازي كنترل كننده ها بيان گرديده و محور بحث را بر روي كنترل كننده PID قرار مي دهيم.
براي پياده سازي كنترل كننده هاي آنالوگ در كامپيوتر لازم است آنها را به فرم زمان گسسته تبديل نماييم. در واقع اين عمل با تقريب مشتق گيري و انتگرال گيري با روابطي كه آنها را به صورت معادلات تفاضلي و يا مجموع بيان كند، عملي خواهد شد. روشهاي مختلفي براي گسسته سازي وجود دارد كه در اينجا تنها به دو روش مهم و صنعتي مي پردازيم :
-
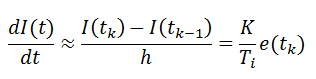
روش Backward Difference
در اين روش مشتق را با شيب دو نقطه تقريب مي زنيم:
برای داشتن روشی قابل تعمیم اجازه دهید این عملیات را با تبدیل لاپلاس و تبدیل Z نیز نمایش بدهیم.انتگرال در حوزه لاپلاس به صورت 1/s خواهدبود.این تقریب در حوزه Z به صورت زیر خواهدبود.
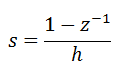
که در آن اپراتور S عملیات مشتق گیری را در حوزه لاپلاس نمایش می دهد و عملیات تفاضل را در حوزه Z به فرم بالا تعریف نموده ایم.در این صورت هرگاه در یک کنترل کننده آنالوگ که بر حسب S و در حوزه لاپلاس تعریف شده است تقریب B.D فوق را جایگزین کنیم کنترل کننده به صورت گسسته در حوزه Z قابل نمایش خواهدبود.
-
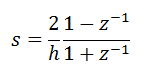
روش دو خطی یا Tustin
دراین روش انتگرال را با فرم ذوزنقه تقریب می زنیم و یا مشتق را با شیب معدل دو نقطه معادل می سازیم:

و یا در حوزه Z خواهیم داشت:
در كنترل كننده تناسبي نيازي به تقريب وجود ندارد تنها عمليات تعيين فرمان كنترلي به صورت گسسته در زمان نمونه برداري انجام مي شود.
در مشتق گيري بصورت عددي بايستي يك نكته رعايت گردد. اگر سيگنالهاي ما داراي نويز باشند و اين نويز را در عمليات مشتق گيري فيلتر ننماييم، دامنه نويز پس از مشتق گيري افزايش يافته و اين باعث از دست دادن اطلاعات دقيق در فرآيند مي گردد. لذا در كليه فرآيندهاي صنعتي عمليات مشتق گيري را با مشتق گيري با فيلتر جايگزين مي نماييم :
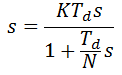
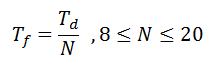
که در آن N بین 8-20 می باشد و ثابت زمانی فیلتر حدود 1/10 ثابت زمانی مشتق گیری است.
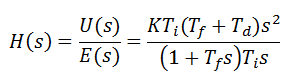
با توجه به تقریب های ارائه شده می توان هرگونه کنترل کننده ای را به صورت گسسته و بفرم Z نمایش داد به عنوان مثال کنترل کننده PID را در نظر بگیرید:

فرض کنید:
با قرار دادن تقریب های بالا می توان فرم کنترل کننده را در حالت Z به نمایش گذاشت:
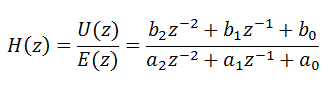
که در آن با جایگذاری روابط فوق در فرم بالا به صورت زیر خواهیم رسید:
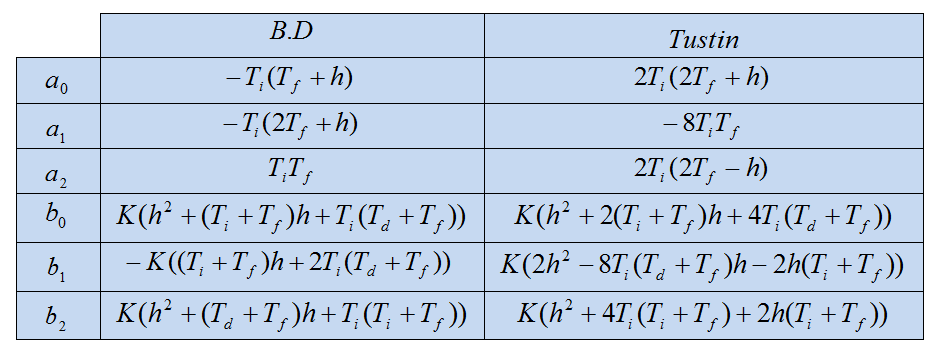
و تنها کافی است برنامه زیر در میکروپروسسور وارد گردد:





6 Comments
Hossein
درباره10 سال agoسلام خسته نباشی سایت خیلی خوبهی هستش و بیشتر موارد مرتبط با موتور القایی رو داخلش قرار دادین. امّا در مورد موتورهای مغناطیس دائم چیزی پیدا نکرم. اگه ممکنه موضوع، آدرس سایت، کتاب و ... که در این مورد و کنترل آنها مطلب داره برام معرفی کنی؟ با تشکّر فراوان
پاسخAdmin
درباره10 سال agoکتاب آقای Peter.Vas و همچنین کتاب آقای Seung-Ki-Sul و همچنین کتاب زیر منابع خوبی می باشند:
Permanent Magnet Synchronous and Brushless DC Motor Drives by R. Krishnan
پاسخata
درباره10 سال agoسلام ببخشید کنترتر pid در محیط z ضریب k برای به دست آوردن ضرایب مخرج چه طور محاسبه میشه؟ ممنون میشم اگه راهنمایی فرمایید. و اگر رفرنس اصلی این متن رئ هم بذارید ممنون میشم.
پاسخAdmin
درباره10 سال agoرفرنس این قسمت از کتاب اتوماسیون صنعتی آقای دکتر تقی راد می باشد.
پاسخناشناس
درباره4 سال agoسلام وقت بخیر برای ساخت pid دیجیتال یا آنالوگ از چه نرم افزاری استفاده کنم؟؟؟
پاسخAdmin
درباره4 سال agoاگر شبیه سازی میخواهید انجام دهید نرم افزار متلب گزینه مناسبی است و اگر بصورت عملی می خواهید پیاده سازی کنید از میکرو کنترلرها استفاده باید کرد.
پاسخ