تنظیم کنترل کننده جریان موتور القایی
همانند ماشین های DC برای موتورهای AC که نیاز به کنترل دقیق دارند کنترل کننده جریان لازم می باشد. چندین روش برای کنترل کننده جریان ماشین های AC پیشنهاد شده است مانند: کنترل کننده هیسترزیس، کنترل کننده پیش بین (predictive regulator)، کنترل کننده Dead Beat و …
در این قسمت بر اساس قسمت قبل که نحوه تنظیم کنترل کننده PI جریان برای موتور DC شرح داده شد می خواهیم نحوه تنظیم کنترل کننده جریان را برای موتورهای AC توضیح دهیم بطوری که کنترل کننده در مقابل تغییرات پارامترهای ماشین AC مقاوم باشد.
برای این کار ابتدا برای یک سیستم سه فاز متعادل روابط را محاسبه کرده و ضرایب کنترل کننده را بدست می آوریم و سپس با مقایسه سیستم سه فاز با موتور القایی ضرایب را برای این موتور تصحیح می کنیم.
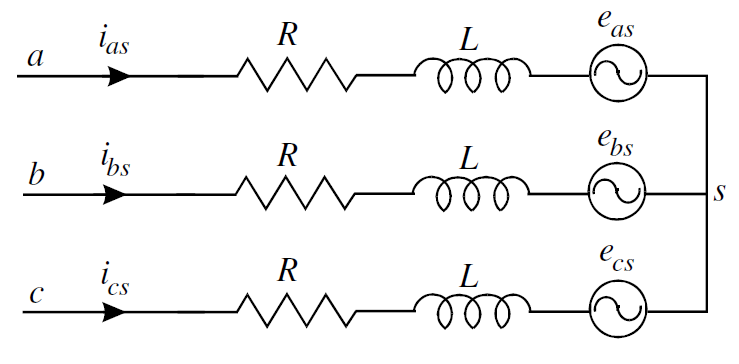
سیستم سه فاز متعادل شامل مقاومت، سلف و ولتاژ EMF داخلی بصورت زیر را در نظر بگیرید:
چون سیستم متعادل است پس می توان نوشت:
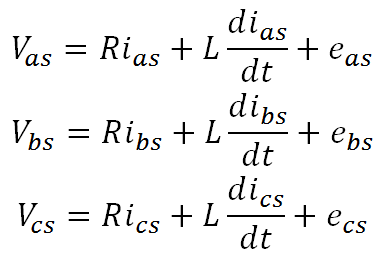
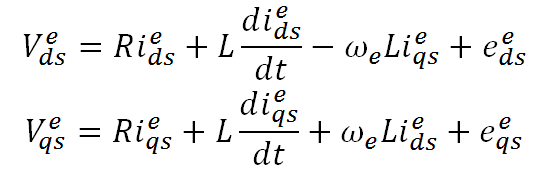
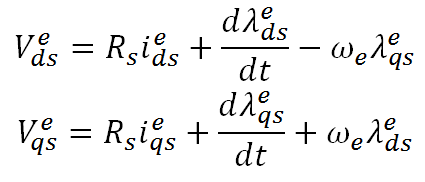
توجه کنید که شکل موج EMF ها بصورت سینوسی با فرکانس ωe می باشند.می توان برای سیستم سه فاز معادلات ولتاژ را بصورت زیر را نوشت:
با تبدیل معادلات بالا در قاب مرجع dq سنکرون داریم:
توجه کنید که چون سیستم متعادل است پس ترم توالی صفر ندارد.
اگر تمام متغیرهای الکتریکی نشان داده شده در مدار بصورت سینوسی با فرکانس ωe تغییر کنند بنابراین تمام متغیرهای معادله بالا بصورت DC تبدیل می شوند. حال می توان از روش استفاده شده برای موتور DC برای تنظیم کنترل کننده جریان AC استفاده کرد.
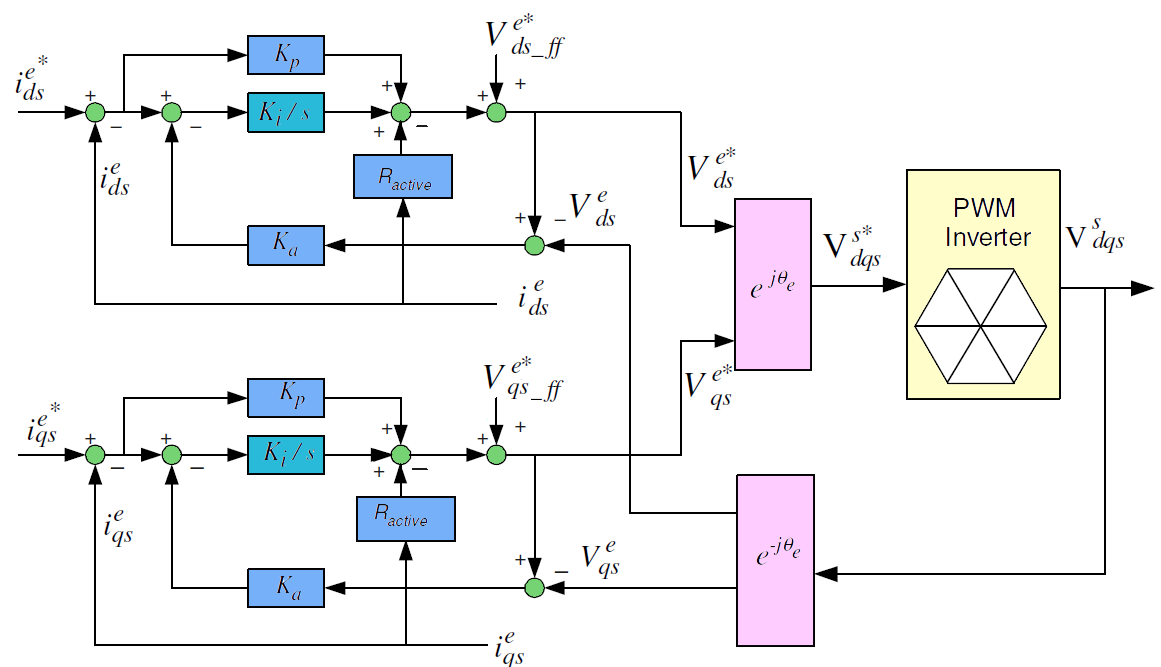
شکل زیر بلوک دیاگرام کنترلی در قاب مرجع dq سنکرون را نشان می دهد:
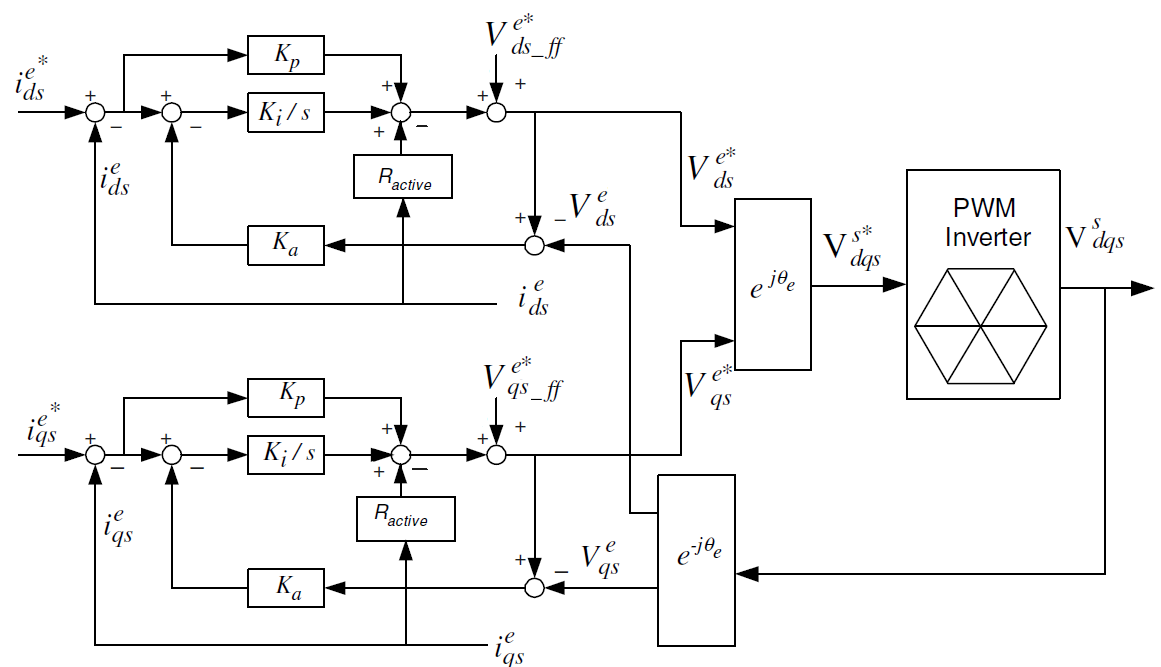
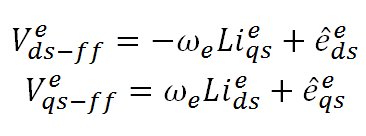
توجه کنید که از روش Anti-windup برای محدود کردن ولتاژ خروجی اینورتر استفاده شده است همچنین چون دو محور d و q وجود دارد بنابراین دو کنترل کننده جریان برای هر محور مورد استفاده قرار گرفته است. تنها تفاوت این روش با روش ارائه شده برای کنترل کننده موتور DC مقدار ولتاژ فیدفوروارد می باشد که تنها شامل پارامتر Back EMF نمی باشد بلکه از دو ترم زیر ساخته شده است:
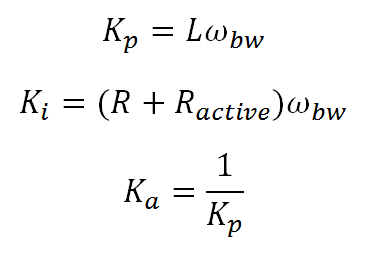
همانند روش قبلی اگر پهنای باند کنترل کننده جریان را ωbw در نظر بگیریم بنابراین پارامترهای کنترل کننده PI براحتی محاسبه می شود. برای بهبود عملکرد کنترل کننده در برابر تغییرات پارامترهای سیستم و مقاوم کردن آن ترم Active Damping به مقاومت استاتور اضافه شده است. پارامترهای کنترل کننده بصورت زیر تنظیم می شوند:
توجه کنید که چون این روش تنظیم بر اساس مدار متعادل نشان داده شده در بالا بود پس برای تنظیم کنترل کننده جریان موتور القایی باید معادلات موتور القایی را به فرم مشابه نوشته و با مقایسه آن با معادلات بالا، مقادیر کنترل کننده را برای موتور القایی بدست آوریم.
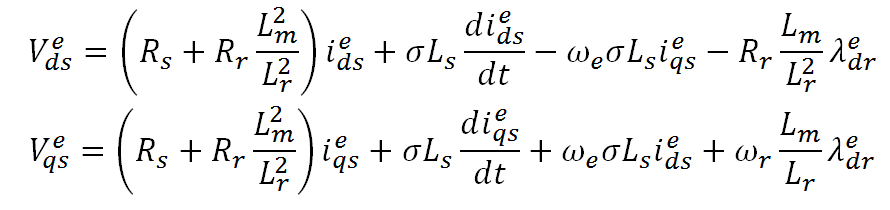
می توان معادلات ولتاژ استاتور موتور القایی را در دستگاه dq سنکرون بصورت زیر نوشت:
بطور مشابه برای معادلات روتور نیز داریم:
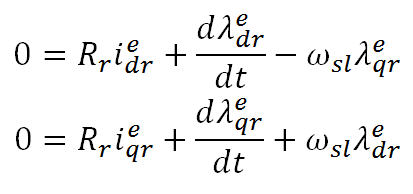
که معادلات شار نشتی استاتور و روتور نیز بصورت زیر محاسبه می شود:

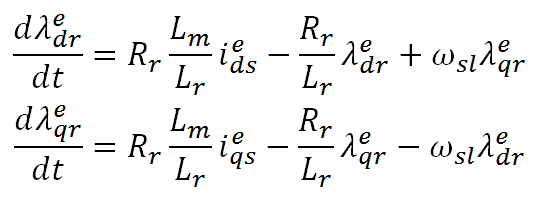
با حذف جریان روتور از معادلات ولتاژ روتور داریم:
حال با جایگزین کردن معادله بالا و معادله شار نشتی استاتور در معادلات ولتاژ استاتور داریم:
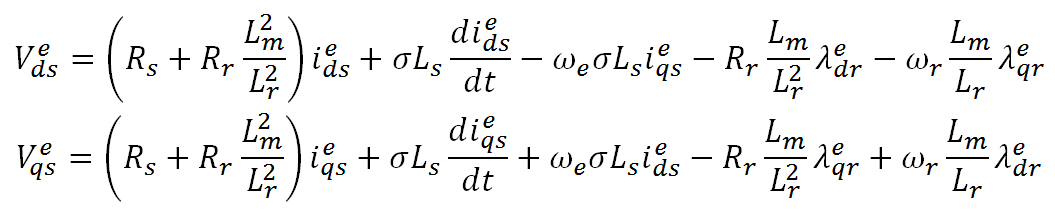
اگر موتور القایی به روش کنترل برداری FOC کنترل شود پس مقدار شار نشتی محور q روتور برابر صفر می باشد. بنابراین رابطه بالا بصورت زیر ساده می شود:
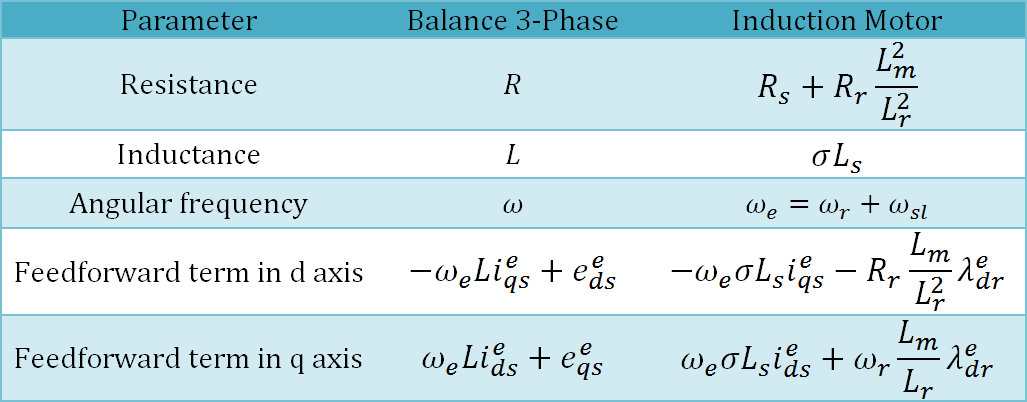
با مقایسه رابطه بالا با رابطه مدار سه فاز متعادل ضرایب بصورت زیر محاسبه می شود:
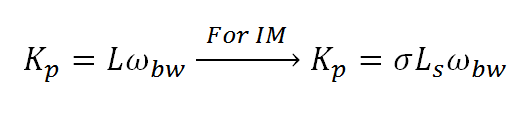
برای مثال برای تنظیم ضریب تناسبی داریم:




3 Comments
s.gh.s
درباره10 سال agoسلام بابت سایت بسیار خوبتون ازتون تشکر میکنم، واقعا جای سپاسگزاری داره ازتون. اما میخواستم خواهش کنم درمورد کنترل کننده های پیش بین موتورهای القایی اگر مطلبی دارید، بگذارید .
پاسخsaeed
درباره10 سال agoسلام این معادلاتو کجای نتلب بنویسیم .help
پاسخAdmin
درباره10 سال agoطبق روابط بدست آمده باید مقادیر کنترل کننده را در بلوک بالا (سیمولینک) بر اساس این روابط قرار دهید.
پاسخ