تنظیم کنترل کننده جریان موتور DC
در این مقاله به تنظیم کنترل کننده جریان موتور DC می پردازیم. در سیستم های پیچیده معمولاً یک حلقه کنترلی جوابگوی نیازهای کنترلی نمی باشد یا حتی ممکن است نتواند پایداری را تضمین کند. به همین علت از چند حلقه کنترلی تودرتو استفاده می شود. برای مثال در کنترل موتورهای الکتریکی معمولاً از سه حلقه استفاده می شود. شکل زیر بلوک دیاگرام کنترلی کلی موتورهای الکتریکی را نشان می دهد:
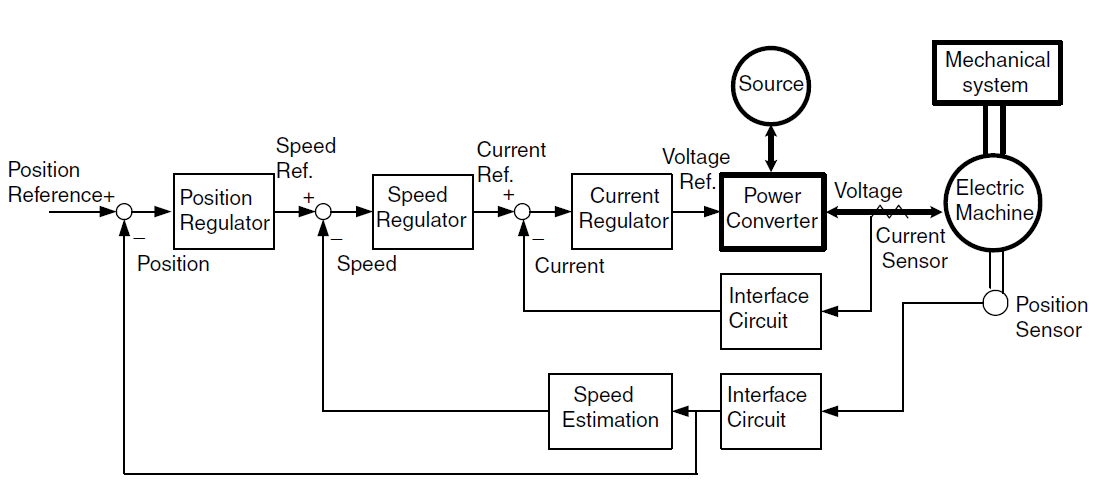
حساس ترین و مهم ترین حلقه، حلقه داخلی می باشد زیرا اگر سرعت پاسخ دهی این حلقه مناسب نباشد حلقه های بیرونی در عمل کارایی ندارند. در عمل سرعت حلقه داخلی را 5 تا 10 برابر سرعت حلقه خارجی در نظر می گیرند. منظور از سرعت پاسخ دهی همان پهنای باند حلقه می باشد. پهنای باند ωbw ، فرکانس سیگنال سینوسی می باشد که اگر وارد سیستم شود اندازه پاسخ سیستم کمتر از 2√ /1 مقدار ورودی شود:

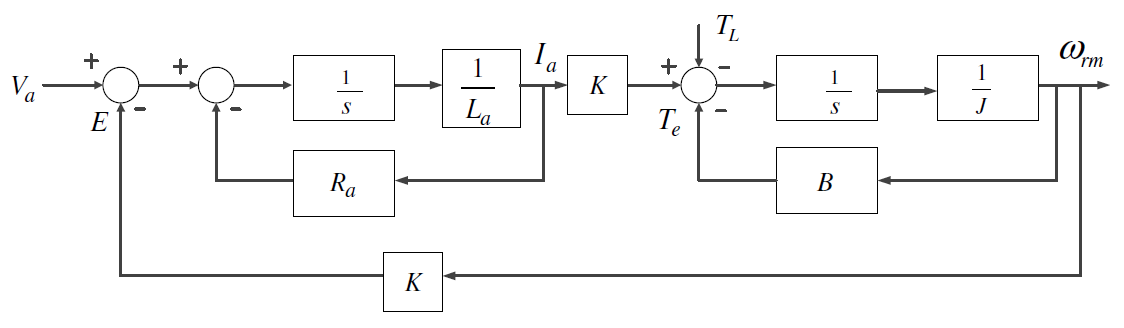
همان طور که در قسمت های قبل اشاره شد مدل موتور DC بصورت زیر می باشد:
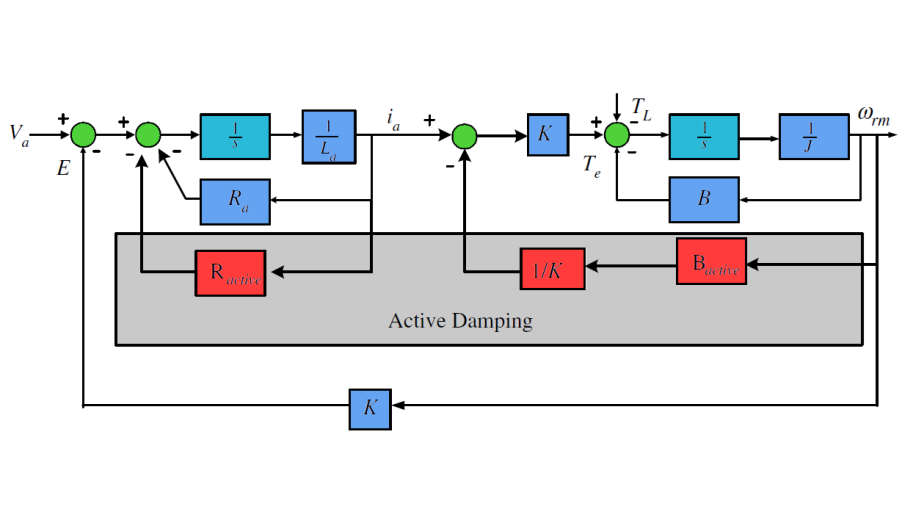
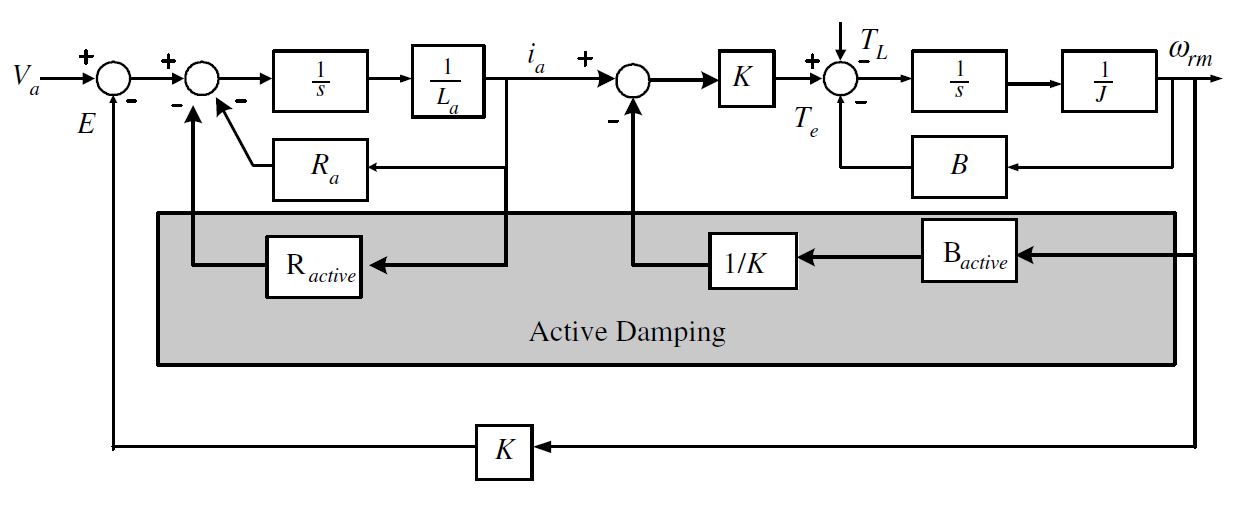
مقاومت آرمیچر Ra مولفه میرا کننده قسمت الکتریکی و ضریب اصطکاک B مولفه میرا کننده قسمت مکانیکی می باشند که این دو مولفه باعث کاهش راندمان سیستم می شوند اما می توانند پایداری سیستم و سرعت پاسخ دهی را افزایش دهند. در صورت حذف این دو مولفه میرا کننده پسیو (Passive Damping) سیستم نوسانی می شود. برای بهبود عملکرد کنترلی می توان مولفه های میرا کننده فعال (Active Damping) را بصورت یک فیدبک کنترلی مانند شکل زیر به سیستم اضافه کرد:
همان طور که مشخص است با اضافه کردن مقاومت Ractive مقادیر ویژه سیستم تغییر می کنند. هر چقدر مقدار Ractive بزرگتر از Ra شود سیستم کنترلی نسبت به تغییرات Ra مقاوم تر می شود. همین استدلال را می توان برای ضریب اصطکاک نیز بکار برد.
همان طور که از شکل بالا مشخص است اضافه کردن مقاومت میراکننده مانند یک فیدبک حالت می ماند که می تواند دینامیک سیستم کنترلی را افزایش دهد.
تابع تبدیل جریان آرمیچر بر حسب ولتاژ آن بصورت زیر می باشد:
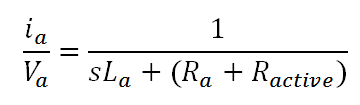
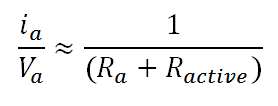
اگر مقدار Ractive را خیلی بزرگتر از اندازه sLa در پهنای باند ωbw حلقه کنترلی در نظر بگیریم، معادله بالا بصورت زیر تبدیل می شود:
اگر رابطه گشتاور با جریان و هم چنین ولتاژ آرمیچر با گشتاور مرجع را بصورت زیر در نظر بگیریم:
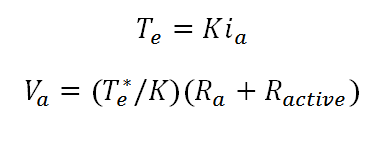
خواهیم داشت:
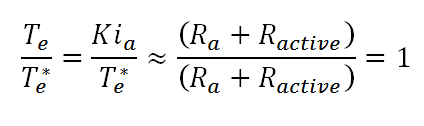
رابطه بالا نشان می دهد که اگر مقدار Ractive را به اندازه کافی بزرگ در نظر بگیریم می توان گشتاور را آنی کنترل کرد. توجه کنید که نمی توان مقدار Ractive را زیاد افزایش داد زیرا باعث تاخیر بیش از اندازه در سیستم شده و ممکن است سیستم ناپایدار شود. در عمل مقدار مولفه میراکننده را در ترم انتگرال گیر کنترل کننده پیاده سازی می کنند.
برای طراحی کنترل کننده جریان فرض کنید که اینرسی موتور و بار به اندازه کافی بزرگ باشد پس می توان مقدار back EMF موتور را ثابت و موتور را بصورت یک مدل R-L ساده بصورت زیر در نظر گرفت:
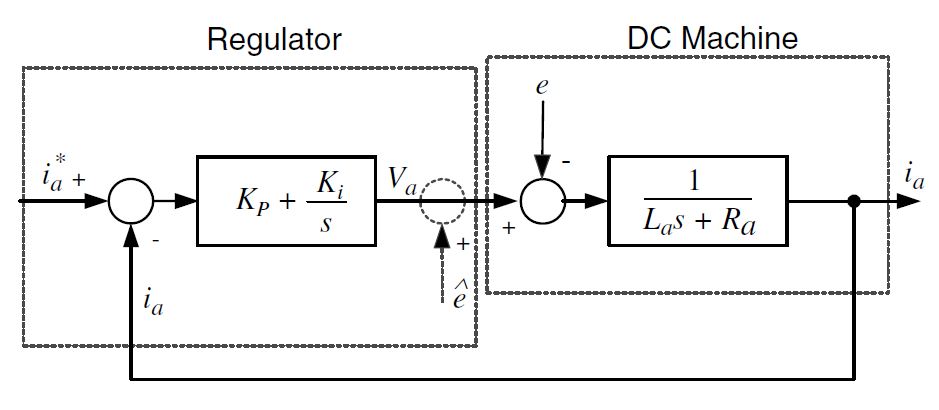
اگر مقدار ولتاژ EMF موتور را بتوان بوسیله سرعت تخمین زد پس می توان برای حذف اغتشاش از جبران ساز فیدفوروارد استفاده کرد. این قسمت در شکل بالا بوسیله ^e نشان داده شده است.
می توان پارامترهای کنترل کننده PI جریان را طوری تنظیم کرد که تابع انتقال حلقه بسته سیستم بصورت یک فیلتر پایین گذر درجه یک تبدیل شود. برای این کار کافیست که مقادیر پارامترهای کنترل کننده بصورت زیر تنظیم شوند:
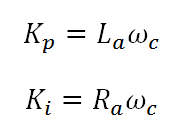
که ωc همان پهنای باند ωbw کنترل کننده می باشد. با انتخاب این مقادیر تابع انتقال حلقه بسته شکل بالا بصورت زیر تبدیل می شود:
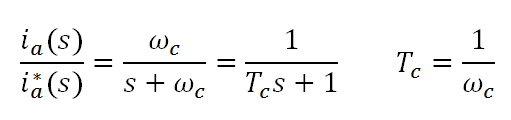
پس از انتخاب پهنای باند سیستم، مقادیر پارامترهای کنترل کننده از روی پارامترهای ماشین محاسبه می شوند. همانطور که مشخص است چون تابع انتقال بصورت یک فیلتر پایین گذر درجه یک می باشد پس دیگر اورشوت یا خطای حالت دائمی وجود ندارد.
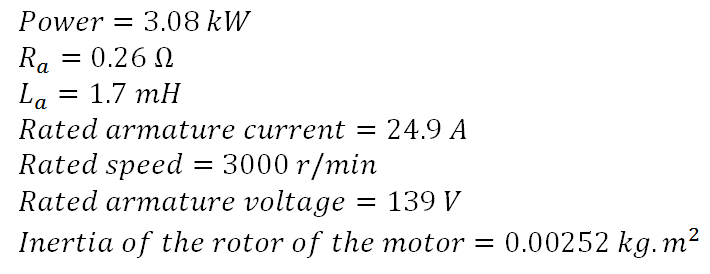
برای آشنایی با این روش تنظیم کردن، یک مثال عملی از کتاب آقای Seung-Ki Sul را شبیه سازی می کنیم. فرض کنید یک موتور DC با مشخصات زیر وجود دارد:
می خواهیم بوسیله بلوک زیر موتور را کنترل کنیم:

مقدار ولتاژ back EMF تخمین زده شده 95 درصد مقدار واقعی آن می باشد که بصورت فیدفوروارد اعمال می شود. همچنین مقدار ثابت گشتاور نیز 95 درصد مقدار واقعی آن می باشد. موتور بوسیله یک چاپر چهار ناحیه ای که ولتاژ لینک DC آن 300 ولت و فرکانس سوئیچینگ آن 5 کیلوهرتز می باشد تغذیه می شود. همچنین مقدار اشباع بلوک ولتاژ مرجع را 250 ولت در نظر می گیریم. اگر مقدار پهنای باند کنترل کننده جریان را 1 کیلوهرتز در نظر بگیریم می خواهیم پاسخ سیستم کنترلی را به ازای مقادیر گشتاور مرجع بصورت زیر بدست آوریم:
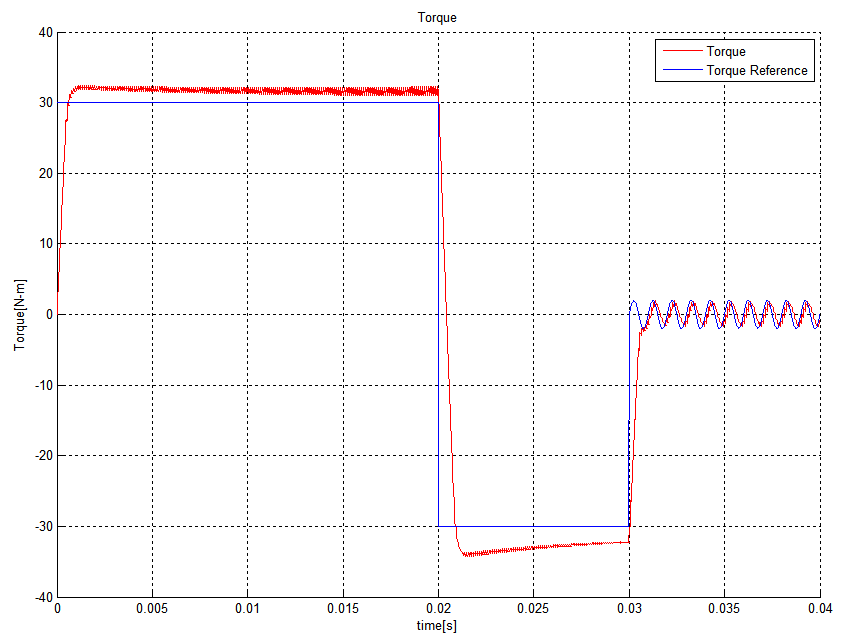
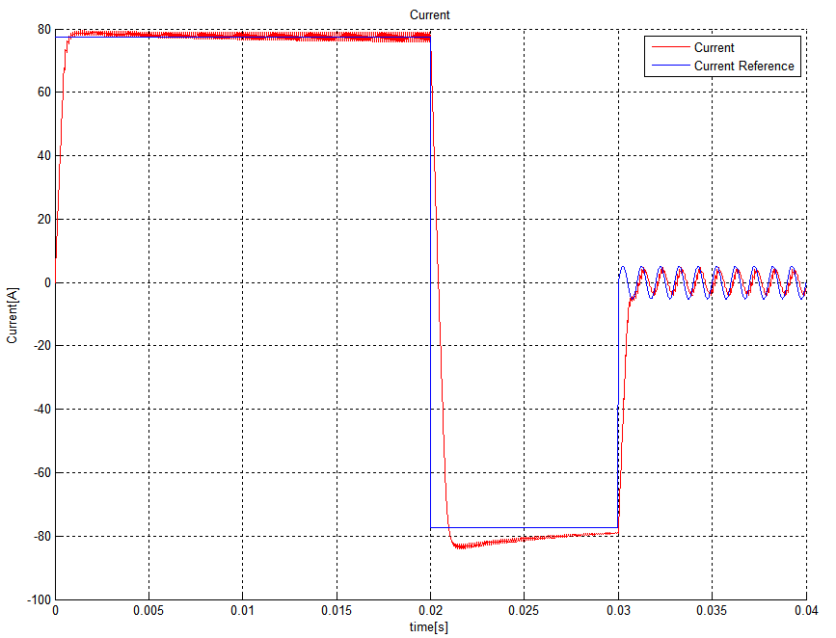
شکل موج گشتاور و جریان موتور پس از اجرای شبیه سازی را می توانید در زیر مشاهده کنید:
در قسمت بعد از این روش برای تنظیم کنترل کننده موتورهای القایی استفاده می کنیم.
برای دانلود شبیه سازی انجام شده با متلب بر روی تصویر زیر کلیک کنید.




3 Comments
احسان
درباره10 سال agoباسلام بی نهایت ممنونم از مطالب سایتتون خیلی واسه من خوب و مفید بود. خدا خیرت بده اگه شبیه سازی مقاله هم انجام میدین بفرمایید تا زحمت انجامش رو به شما بدم و هزینه شما هم محفوظه...همچنین اگر تمرینات شبیه سازی با متلب رو انجام میدین هم بفرمایید تا...سپاس
پاسخmsm
درباره7 سال agoسلام ، رفرنس های این مطالب رو معرفی میکنید ؟ ممنون
پاسخAdmin
درباره7 سال agoرفرنس این مطلب کتاب Control of Electric Machine Drive[Seung-Ki_Sul] می باشد.
پاسخ