روش های کنترل موتور القایی (بخش سوم)
در بخش های قبلی روش های کنترل اسکالر و روش کنترل برداری جهت یابی میدان برای کنترل موتور القایی شرح داده شد. همان طور که گفته شد درست است که روش کنترل برداری بر اساس جهت یابی میدان (FOC) می تواند موتور را براحتی کنترل کند ولی اشکال این روش پیچیده بودن ساختار، وابستگی به پارامترهای ماشین و همچنین وجود چند کنترل کننده (جریان) در ساختار این روش است.
برای حل این مشکلات روش کنترل مستقیم گشتاور (Direct Torque Control) ارائه شد. همان طور که از اسم این روش مشخص است در این روش مستقیماً گشتاور کنترل می شود.
مزیت های این روش عبارت اند از:
- ساختار ساده
- وابسته نبودن به پارامترهای ماشین
- سرعت عملکرد دینامیکی خوب برای گشتاور و شار
در این روش دیگر احتیاجی به بلوک های مجزاسازی ولتاژ و حلقه کنترل جریان برای کنترل موتور القایی نمی باشد. در این روش حلقه کنترل جریان وجود ندارد بنابراین بردار ولتاژ طوری انتخاب می شود که خطای گشتاور و شار حداقل شود.
برای اینکه با عملکرد این روش آشنا شویم ابتدا باید نحوه تشکیل بردار ولتاژ بوسیله اینورتر را توضیح دهیم.
ساختار یک اینورتر منبع ولتاژی (VSI) بصورت زیر می باشد:
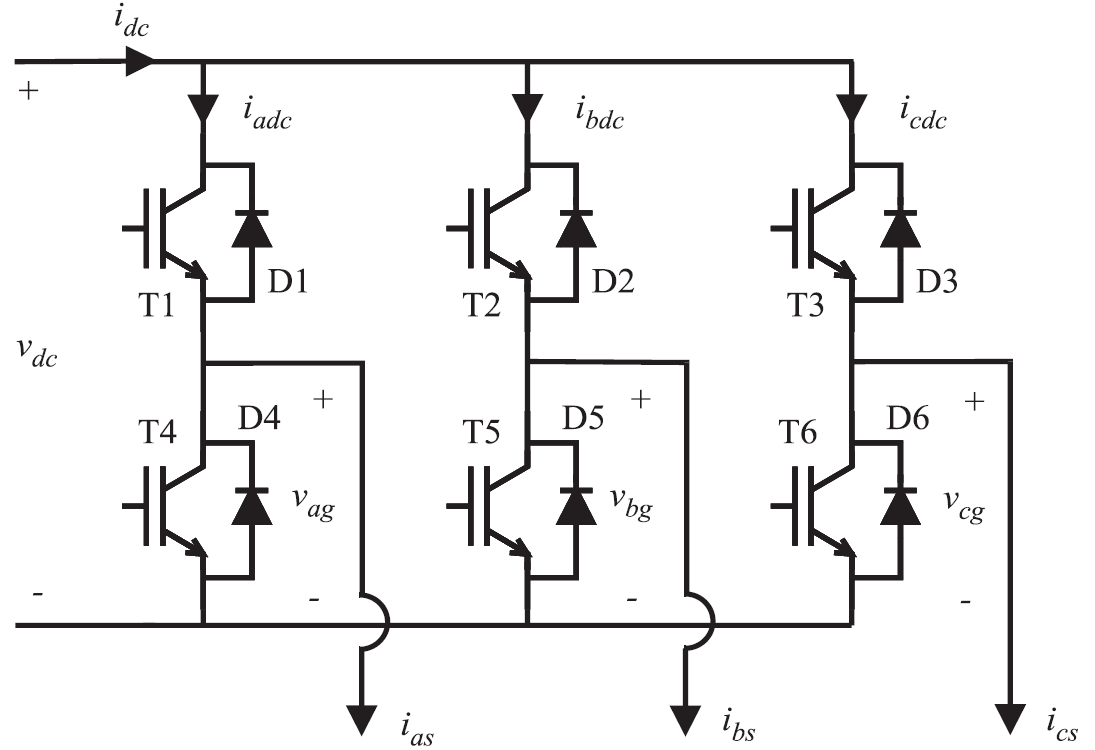
توجه کنید که دو کلید موجود در هر ساق با هم نمی توانند روشن شوند زیرا منبع را اتصال کوتاه می کنند. با توجه به جدول زیر که مربوط به حالت های مختلف برای کلیدها می باشد می توان دریافت که 8 حالت برای بردار ولتاژ خروجی داریم:
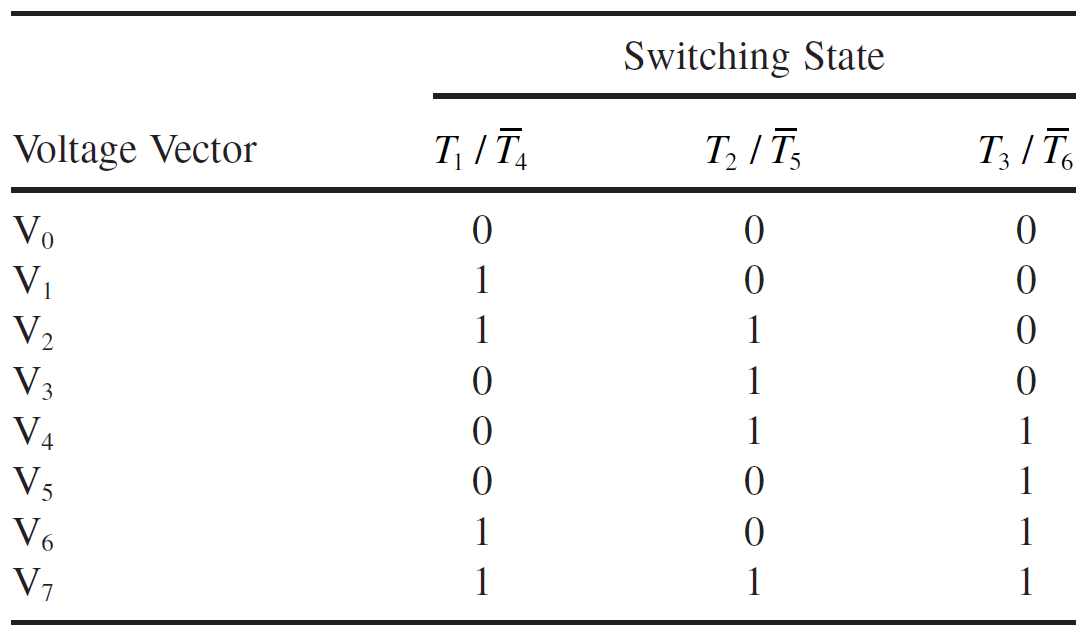
بردار حالتی که تمام کلیدها روشن (V7) و تمام کلیدها خاموش (V0) هستند را بردار ولتاژ صفر می نامند. 6 حالت دیگر بردارهای اصلی را نشان می دهند که اندازه آنها 2/3 ولتاژ لینک DC می باشد.
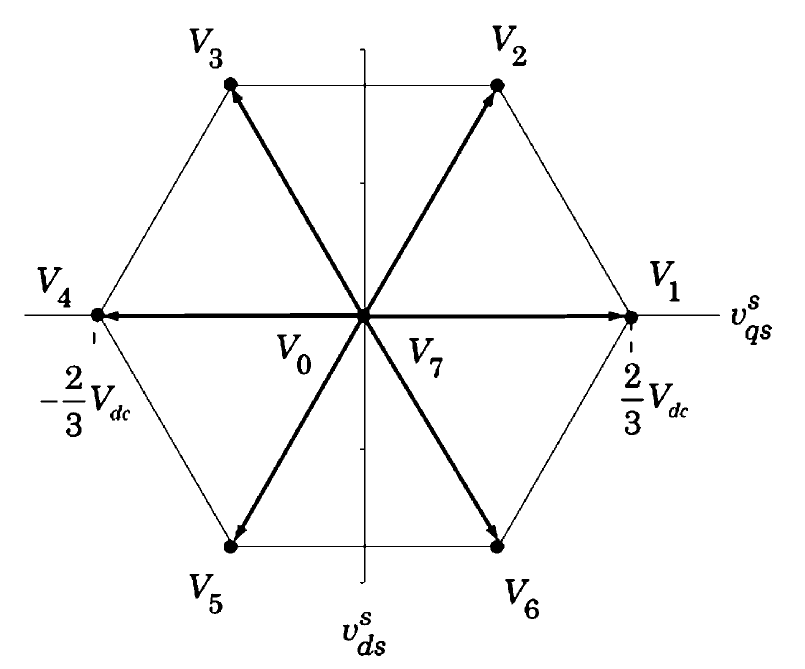
با توجه به این 6 بردار اصلی صفحه ولتاژ به 6 ناحیه تقسیم می شود که هر ناحیه با بردار خود نام گذاری می شود. این نواحی بصورت زیر هستند:
توجه کنید که هر بردار در وسط ناحیه خود قرار دارد. حال که با ساختار اینورتر آشنا شدیم نحوه کنترل مستقیم گشتاور را توضیح می دهیم.
با توجه به شکل زیر می توان رابطه گشتاور بر حسب شار روتور و استاتور را بصورت زیر نوشت:
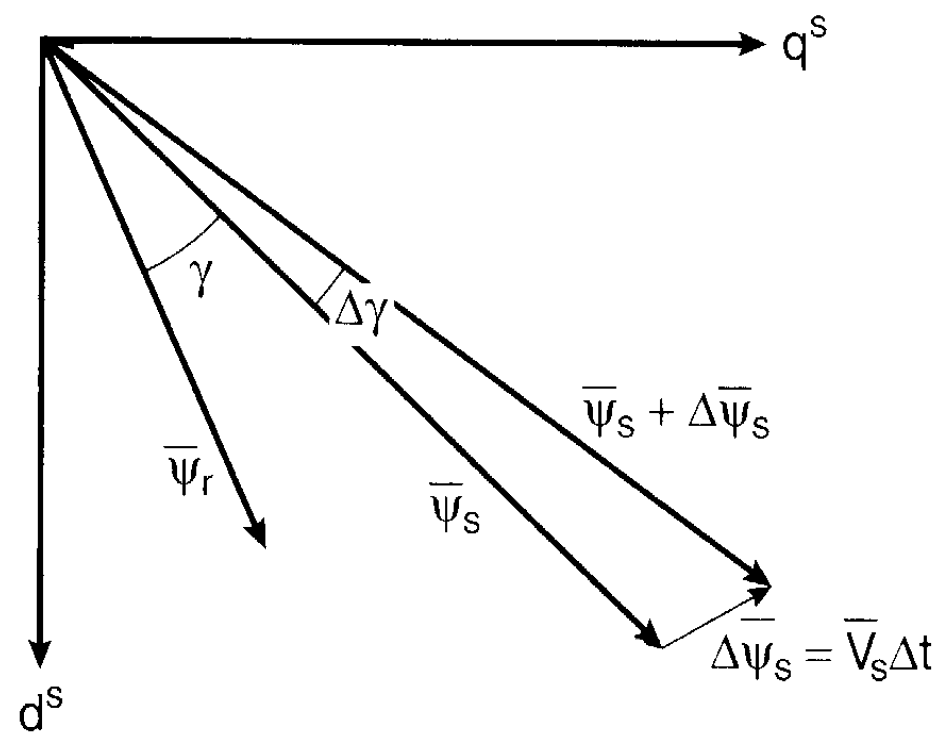
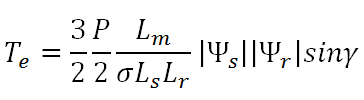
که ψr شار روتور، ψs شار استاتور و γ زاویه بین شار استاتور و روتور می باشد.در صورتی که از افت ولتاژ اهمی استاتور صرف نظر کنیم با توجه به رابطه شار استاتور می توان نوشت:
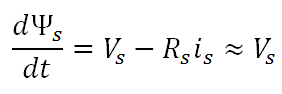
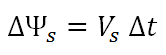
بنابراین در فاصله زمانی کوچک تغییرات شار با ولتاژ برابر است:
از طرفی برای شار روتور برحسب شار استاتور می توان نوشت:

رابطه بالا بدین مفهوم است که شار روتور با یک تاخیر درجه اول به شار استاتور بستگی دارد یعنی می توان در هنگام تغییر شار استاتور شار روتور را ثابت در نظر گرفت و از تغییرات آن صرف نظر کرد.
به عبارت دیگر می توان با اعمال ولتاژ مناسب شار استاتور را تغییر داد و زاویه بین شار روتور و شار استاتور و در نتیجه گشتاور موتور را کنترل کرد.
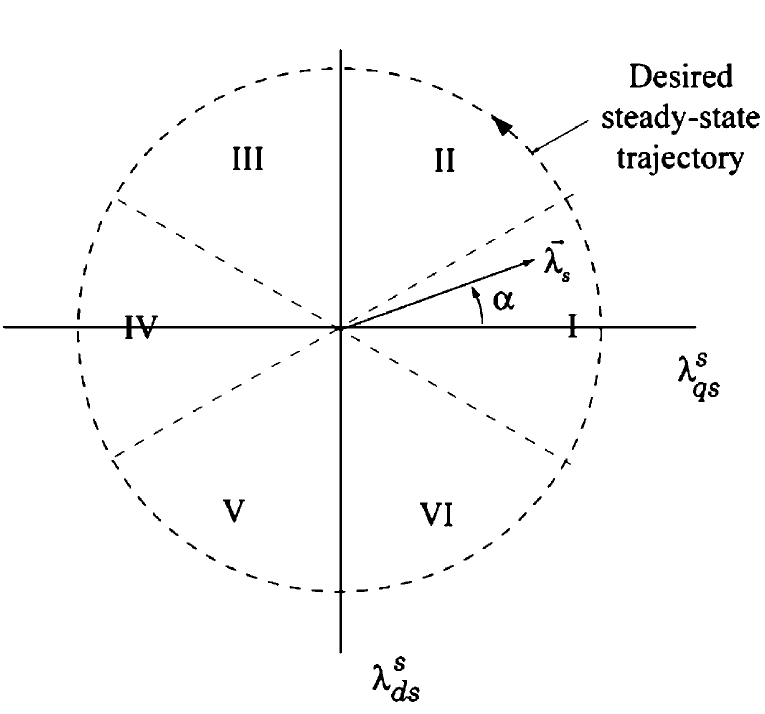
مسئله مهم انتخاب بردار ولتاژ مناسب برای کنترل می باشد. فرض کنید شار در ناحیه اول باشد:
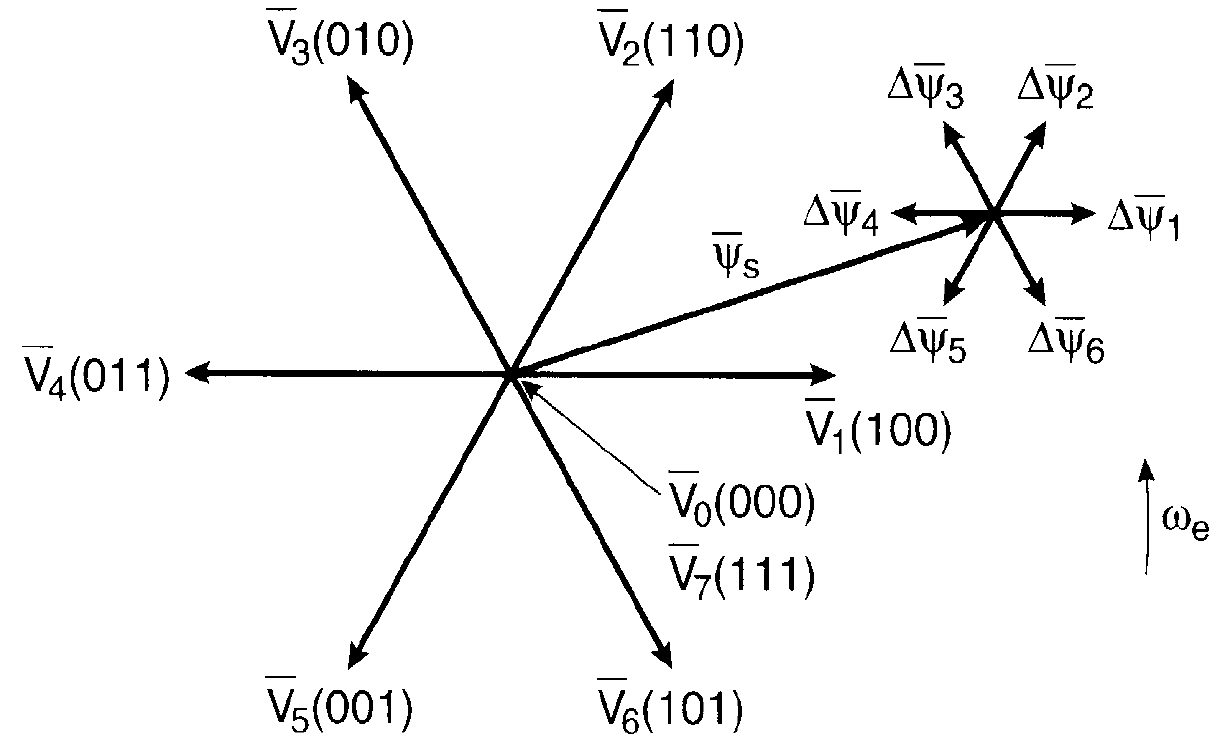
همان طور که مشخص است با اعمال هر یک از 6 بردار نشان داده شده در شکل تغییرات گشتاور و شار مختلفی صورت می پذیرد. مثلا اگر بردار ولتاژ V3 را اعمال کنیم شار را کاهش و گشتاور را افزایش می دهد.
بطور کلی می توان گفت که اگر بردار شار استاتور در ناحیه n باشد اعمال بردارهای ولتاژ Vn-1,Vn,Vn+1 موجب افزایش شار و اعمال بردارهای Vn+2,Vn-2,Vn+3 باعث کاهش شار می شود. اعمال بردارهای Vn+1,Vn+2 باعث افزایش گشتاور و اعمال بردارهای Vn-1,Vn-2 باعث کاهش گشتاور می شوند. بردارهای Vn,Vn+3 بسته به مکان شار ممکن است گشتاور را کاهش یا افزایش بدهد. تاثیر اعمال هر یک از بردارها بصورت خلاصه در جدول زیر نمایش داده شده است:

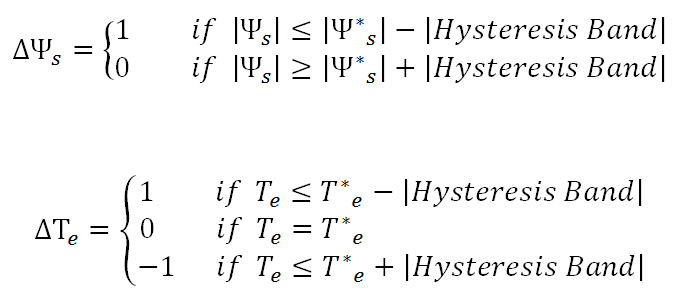
در این روش کنترلی از کنترل هیسترزیس استفاده می شود. برای شار از کنترل دو سطحی و برای کنترل گشتاور (جهت کاهش ریپل گشتاور) از کنترل سه سطحی استفاده می شود بدین معنی که:
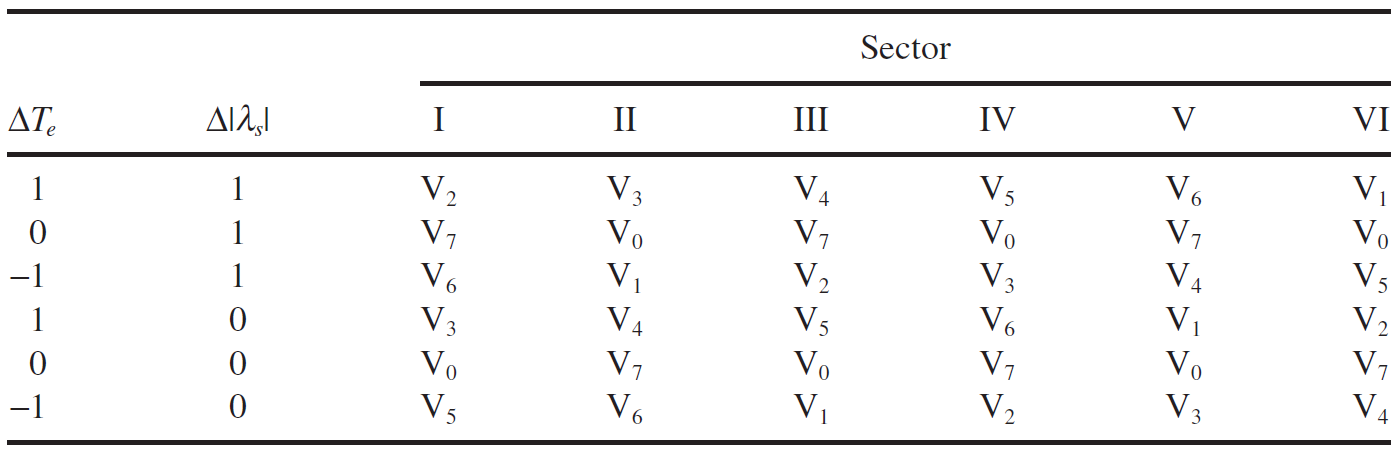
با توجه به جدول تغییرات شار و گشتاور بر حسب بردار ولتاژ اعمال شده و همچنین سطوح کنترل هیسترزیس می توان جدول زیر را بعنوان جدول کلید زنی در نظر گرفت:
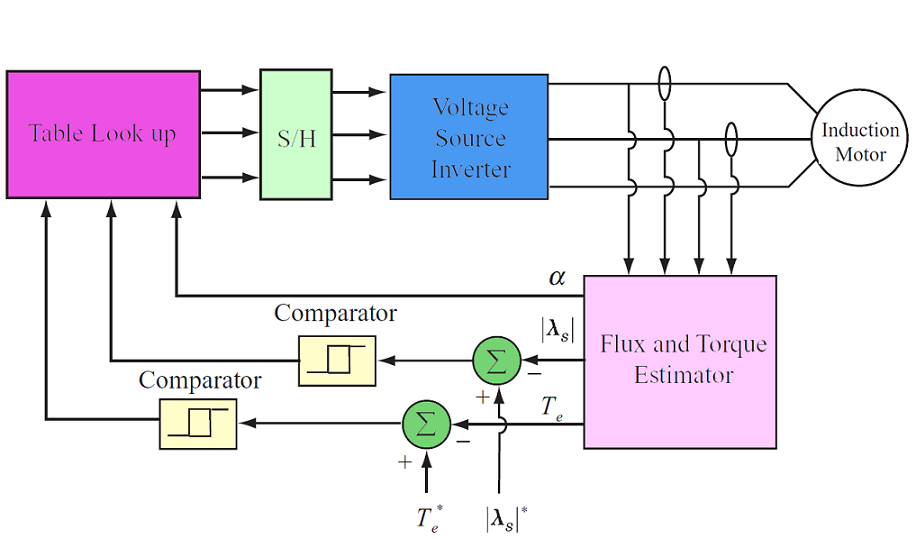
بلوک دیاگرام کنترلی روش DTC بصورت زیر می باشد:
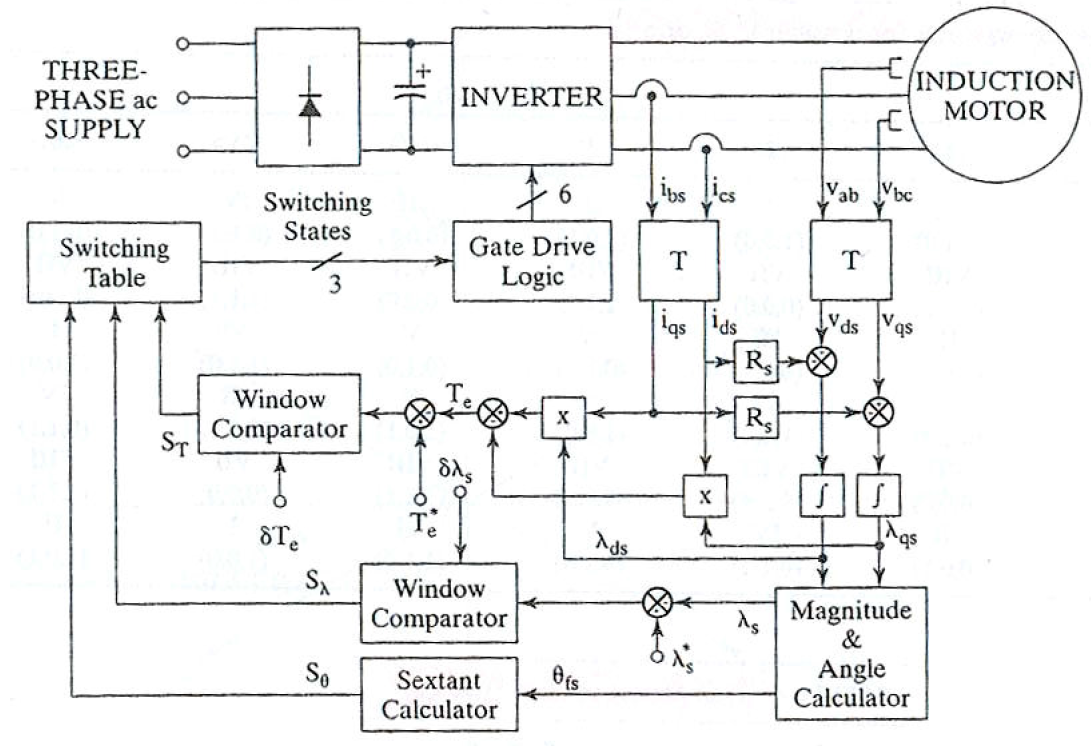
همان طور که از بلوک دیاگرام مشخص است تنها پارامتر استفاده شده ی ماشین، مقاومت استاتور می باشد.
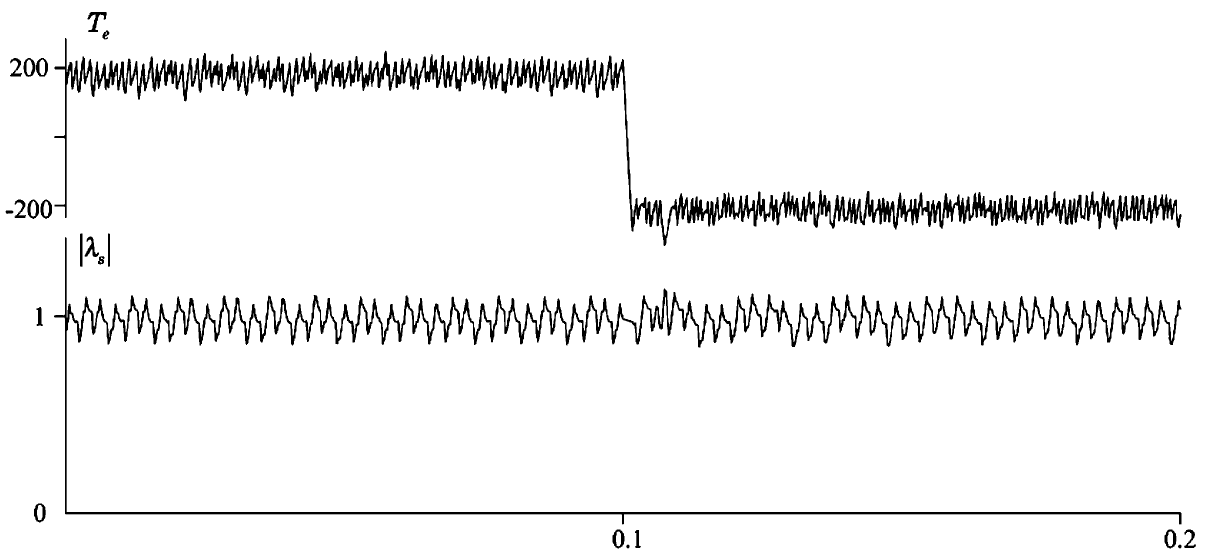
منحنی تغییرات گشتاور و شار بصورت زیر می باشد:
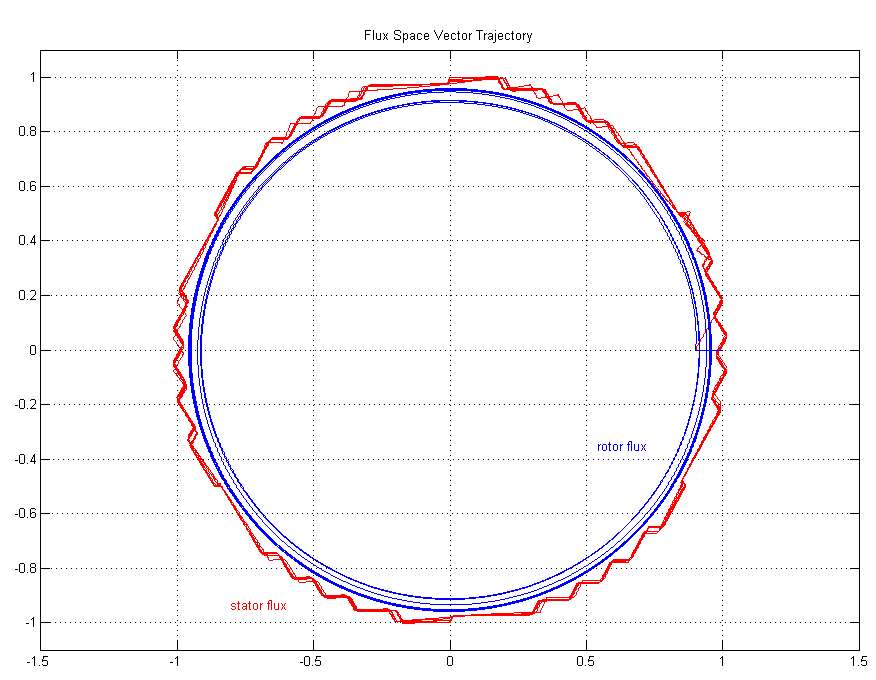
نتیجه شبیه سازی:
نتیجه شبیه سازی شار روتور و استاتور در بردار فضایی با Matlab بصورت زیر می باشد:
همان طور که مشخص است ریپل گشتاور و شار بسیار زیاد می باشد. در کل معایب روش کنترل مستقیم گشتاور عبارت اند از:
- فرکانس سوئیچینگ متغیر (بدلیل استفاده از کنترل هیسترزیس)
- عملکرد ضعیف در سرعت پایین (زیر 5 درصد سرعت نامی)
- ریپل بالا ی گشتاور
- اعوجاج در شار در هنگام تغییر نواحی
- احتیاج به فرکانس نمونه برداری بالا برای اجرای کنترل دیجیتال (حدود 40KHz)
جهت سفارش پروژه شبیه سازی روش DTC با نرم افزار Matlab بر روی عکس زیر کلیک کنید.




25 Comments
mahdi
درباره11 سال agoسلام معمول ترین روش کنترل موتورهای القایی کدام روش است یا به عبارتی راحت ترین روش ؟
پاسخAdmin
درباره11 سال agoراحت ترین و ارزان ترین روش، روش کنترلی V/f است زیرا محسبات سنگینی لازم ندارد ولی عیب های خودش را نیز دارد
پاسخali
درباره11 سال agoسلام منبع روش DTC چه کتابی و نوشته چه کسی می باشد و کدام فصل ؟( روابط هم داخل کتاب می باشد ؟) و از چه نوع موتور القایی در این روش استفاده می شود ؟ سپاس
پاسخAdmin
درباره11 سال agoکتاب آقای Peter Vas و کتاب Control of Induction Motors by [Andrzej M.Trzynadlowski] فصل هشتم می باشد
پاسخali
درباره11 سال agoسلام ورودی سیستم کنترلی DTC بردار Te و Fs می باشند آیا محودیتی در رنج اینها داریم مثل بالاتر از گشتاور نامی یا خیر ؟ wk - wmec - wr -wm - wr چه سرعتهایی می باشند و چه رابطه ای با هم دارند ؟ با تشکر
پاسخAdmin
درباره11 سال agoبله این پارامترها باید کمتر از مقدار نامی موتور باشند.
wr سرعت الکتریکی روتور وwm سرعت مکانیکی روتور می باشند و بصورت زیر با هم رابطه دارند:
wr=(P/2)wm
پاسخali
درباره11 سال agoسلام wk چطور آیا سرعت دلخواه می باشد ؟ window comprator چه بلوکی می باشد ( نحوه کار) باتشکر
پاسخAdmin
درباره11 سال agoمنظورتان از wk چه می باشد؟
window comprator همان بلوک هیسترزیس می باشد.
در نرم افزار متلب بلوک Relay کار هیسترزیس را می کند.
پاسخمصطفی
درباره10 سال agoسلام دوست عزیز وقت شما بخیر به خاطر در اختیار قرار دادن مطالب رایگانی که در سایت تون میگذارید ممنونم بنده قبلا یه پروژه از شما خریدم و ازش راضی بودم و از این بابت ازتون ممنونم می خواستم اگه میشه لطف کنید کتاب Control of Induction Motors by [Andrzej M.Trzynadlowski رو که مطالب بالا رو از اون این کتاب استخراج کرده اید برام ایمیل کنید یا حداقل فصل شماره 8 رو برام بفرستید... ممنون میشم خواهش میکنم زود جواب بدهید ازتون ممنونم
پاسخsina
درباره10 سال agoبا سلام. من شبیه سازی رو انجام دادم ولی در قسمت سوئیچ هاش موندم.نمی دونم از lookup table استفاده کنم یا از چیزه دیگه.ممنون می شم راهنمایی کنین.
پاسخAdmin
درباره10 سال agoاگر نحوه استفاده از Lookup table را نمی دانید بهتر است از یک Matlab Function استفاده کنید و با دستورات if جدول را تنظیم کنید.
پاسخمرتضی
درباره10 سال agoسلام . اندازه شار مرجع چطور تعیین میشه ؟ که موتور هم اشباع نشه. حداگثر گشتاور مرجع چقدر میتونه باشه ؟ ممنون میشم اگه راهنمایی کنید
پاسخAdmin
درباره10 سال agoشار مرجع و همچنین گشتاور مرجع همان مقادیر نامی موتور هستند و از روی مدار معادل حالت دائم حساب می شود.
پاسخسامان
درباره9 سال agoسلام ممنون از سایت خوبتون با افزایش باند هیسترزیس باید تعداد کلید زنی ها کاهش پیدا کنه ولی اینجا افزایش پیدا میکنه چرا؟ در کل چجوری فرکانس کلید زنی سوئیچ ها رو اندازه بگیرم؟ ممنون اگه جواب بدید
پاسخAdmin
درباره9 سال agoدر روش هیسترزیس بطور قاطع نمی توان چنین نتیجه ای گرفت (البته معمولا درست است) و ممکن است که باند هیسترزیس ۱۰ با باند هیستزیس ۵۰ تفاوتی در شکل موج ها نداشته باشد.
برای محاسبه فرکانس سویئچینگ تعداد سویيچینگ در یک زمان مشخص را اندازه گیری کرده و متوسط فرکانس سویئچینگ را محاسبه می کنند.
پاسخسامان
درباره9 سال agoوقتی باند هیسترزیس گشتاور رو کاهش میدم تعداد کلید زنی ها کاهش پیدا میکنه .. در صورتی که طبق نتایجی که از بیشتر مقالات به دست اومده با کاهش باند فرکانس کلید زنی بیشتر میشه.. به نظرتون این تناقض نیست؟ با استفاده از سیمولینک این پروژه چجور بفهمم فرکانس کلید زنی افزایش داشته یا کاهش؟ ببخشید که زیاد سوال میپرسم دارم رو پایان نامم که بهبود این روشه کار میکنم ..ممنون که کمک میکنین.
پاسخAdmin
درباره9 سال agoبله بنظرم جایی مشکل دارد و نباید چنین اتفاقی بیافتد.
برای اندازه گیری فرکانس کلید زنی از بلوک counter استفاده کنید.
پاسخمجتبی
درباره8 سال agoبا سلام برای کنترل ژنراتور شار محوری مغناطیس دائم 1kw ( axial flux permanent magnet syncronous generator ) برای کاربرد توربین بادی چه روشی رو پیشنهاد میکنید؟ اساسا نوع ژنراتور در تعیین روش کنترلی تاثیر داره؟ استفاده از گیربکس یا عدم استفاده چطور؟
پاسخAdmin
درباره8 سال agoاستفاده از گیربکس بستگی به توربین و تعداد قطب های ژنراتور دارد. همچنین ساختار اتصال به شبکه (استفاده از یکسوساز یا اینورتر) نیز می توان یک عامل مهم باشد.
در کل این سوال ها خیلی تخصصی هستند و باید به مقالات مرتبط مراجعه شود.
پاسخایمان
درباره7 سال agoسلام و تشکر از صبر و حوصله شما در پاسخگویی به سوالات. بنده سوالی داشتم و ممنون میشم کمک بفرمایید. معادل اون بلوک gate drive logic در سیمولینک چی هست؟! همان بلوکی که قبل از اینورتر آمده و عملا سه حالت کلیدزنی رو به شش حالت تبدیل میکنه و به اینورتر میده. با تشکر از شما
پاسخAdmin
درباره7 سال agoورودی بلوک سه سیگنال مربوط به کلیدهای بالا می باشند. شما باید مقدار not این سیگنال ها را نیز بدست آورده و در کل ۶ سیگنال را به ۶ کلید اعمال کنید.
پاسخایمان
درباره7 سال agoبا سپاس از لطف و محبت شما در پاسخگویی جسارتا منظور از مقدار not این است که به عنوان مثال اگر سه سیگنال ورودی به صورت (1,1,0) بود باید not ان را به صورت (0,0,1) تولید کرده و درکل (1,1,0,0,0,1) را به کلیدها اعمال نمود؟
پاسخAdmin
درباره7 سال agoدرست است البته باید ابتدا خود سیگنال و سپس not آن را اعمال کنید. برای مثال خودتان در کل باید پالس زیر را اعمال کرد:
(1,0,1,0,0,1)
پاسخعلیرضا
درباره6 سال agoیک سوال برام واجبه ولتاژهای وی هفت و وی صفر چون دامنشون صفره پس قاعدتا نه میتونن گشتاور رو تغییر بدن و نه زاویه ی دلتارو.پس چجوری ما تو جدول کلیدزنی اعمالشون میکنیم درحالی که نیاز به شار داریم
پاسخAdmin
درباره6 سال agoهمانطور که خودتان گفتید این بردارها تاثیری روی گشتاور ندارند و برای زمانی که نیاز به تغییر گشتاور نیست باید اعمال شوند. اینکه بردار v0 یا v7 اعمال شود بستگی به بردار قبلی دارد و بگونه ای انتخاب می شود که کمترین سوئیچینگ رخ بدهد.
پاسخ