موتور القایی و مدل آن (بخش اول)
موتورهای القایی بخاطر طراحی ساده و پایدار, بهای ارزان, هزینه نگه داری پایین و اتصال آسان به منبع AC از پرکاربردترین موتورها در صنایع است. این موتورها از یک قسمت ساکن به نام استاتور و یک قسمت دوار به نام روتور ساخته شده اند که روتور بر روی محور نصب بوده و درون استاتور می چرخد. استاتور به یک منبع AC سه فاز متصل شده و باعث ایجاد یک میدان گردان می شود. این میدان گردان باعث القاء جریان درون روتور گشته و باعث می شود که روتور به دنبال میدان استاتور با سرعت کمتر بچرخد. به همین دلیل نام دیگر این موتورها، موتور آسنکرون (غیرهمزمان) می باشد.
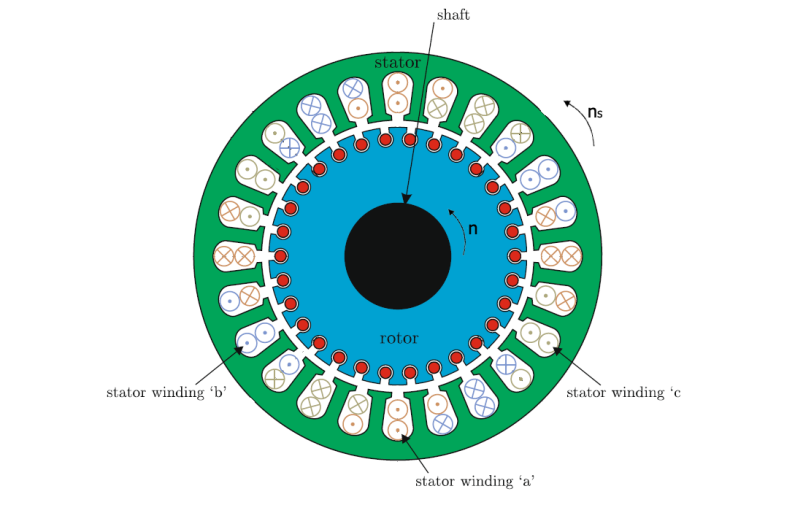
اگر فرکانس منبع f ، تعداد قطب ها P ، سرعت میدان دوار استاتور ns و سرعت روتور n باشد رابطه های زیر برقرار است:
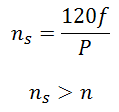
این تفاوت سرعت را با پارامتری به نام لغزش نشان می دهند:
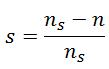
اگر موتور بدون بار باشد چون سرعت روتور به سرعت میدان استاتور خیلی نزدیک است پس لغزش تقریباً برابر صفر می باشد.
موتورهای القایی سه فاز از نظر ساختمان روتور به دو صورت تقسیم بندی می شوند:
-
روتور سیم بندی شده (Wound rotor type)
-
روتور قفس سنجابی (Squirrel cage type)
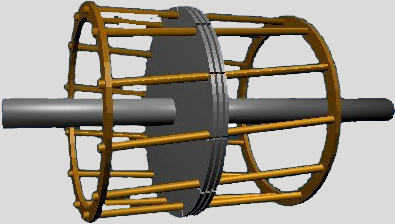
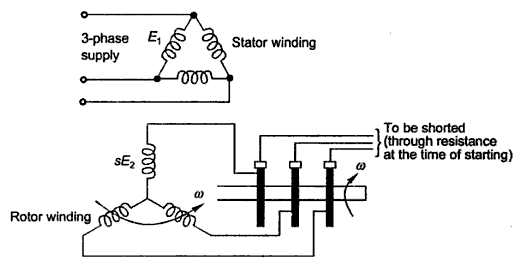
ساختار این موتور ها در شکل زیر نشان داده شده است:

روتور سیم بندی شده
روتور قفس سنجابی
به دلیل مزایای بالای روتورهای قفسی مانند سادگی، هزینه کمتر، نیاز کمتر به تعمیر و نگهداری و… بیش از 90 درصد از موتورهای القایی دارای روتور قفس سنجابی می باشند. در این موتورها هر شکاف یک میله مسی یا آلومنیومی یا آلیاژی را می برگیرد که انتهای میله ها اتصال کوتاه شده است. میله های گردان دقیقا با چرخگاه موازی نیستند، بلکه قدری اریب کار گذاشته می شوند بدلیل اینکه موتور بدون صدا کارکرده و از هارمونیک ها در شکاف ها کاسته شود.
در موتورهای با روتور سیم بندی شده ، علاوه بر 3 پایانه مربوط به استاتور که به برق AC وصل می شود، 3 پایانه از روتور خارج شده که به حلقه های لغزان وصل می گردند. موتورهای القایی روتور سیم پیچی شده ، خیلی گرانتر از نوع قفسی هستند و به نگهداری بیشتری به دلیل اصطکاک جاروبکها و حلقه های لغزان نیاز دارند. در نتیجه موتورهای القایی روتور سیم پیچی کمتر استفاده می شود. چون پایانه های روتور از موتور خارج شده پس می توان مقاومت اضافی به آن اضافه کرد و گشتاور راه اندازی را کنترل کرد.
مدار معادل موتور القایی سه فاز
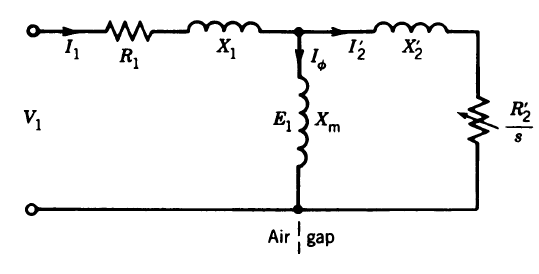
مدار معادل موتور القایی مانند یک ترانسفورماتور می باشد با این تفاوت که ثانویه آن در حال حرکت می باشد. برای مدل کردن این حرکت می توان ثانویه را ساکن در نظر گرفت با این تفاوت که فرکانس ثانویه متفاوت از فرکانس تغذیه اولیه است. مدار معادل یک فاز موتور القایی بصورت زیر می باشد:
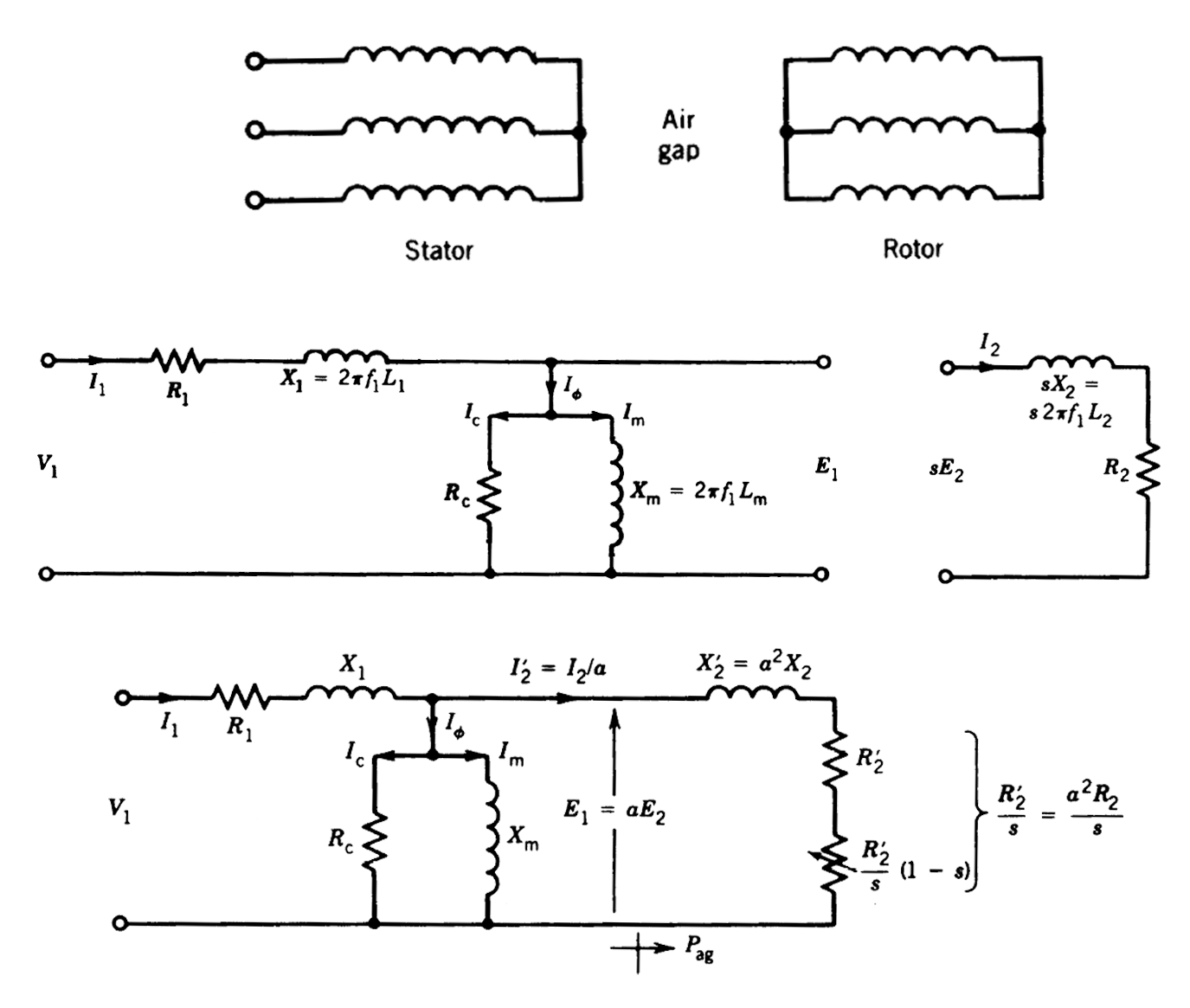
V1 ولتاژ فاز در پایانه استاتور، R1 مقاومت هر فاز سیم پیچ استاتور، X1 راکتانس نشتی هر فاز سیم پیچ استاتور،Xm راکتانس مغناطیس شوندگی در هر فاز استاتور، Rc مقاومت نشان دهنده تلفات هسته استاتور، R2 مقاومت هر فاز روتور، X2 راکتانس نشتی هر فاز روتور و a نسبت دور سیم پیچی استاتور و روتور است. همان طور که مشخص است این مدل برای حل مسایل پیچیده می باشد بنابراین مدل های دیگری برای سادگی بصورت زیر پیشنهاد شده است:
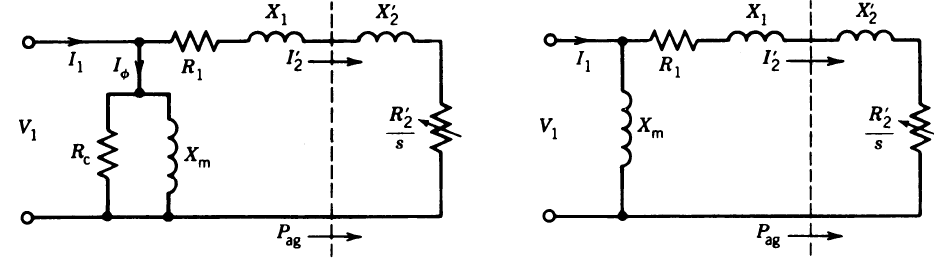
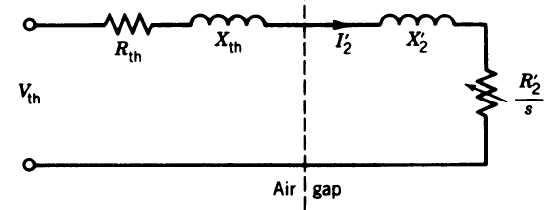
هم چنین IEEE مدل زیر را پیشنهاد کرده است:
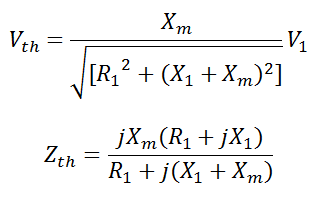
می توان مدار معادل تونن IEEE را بصورت زیر درآورد:
که ولتاژ تونن و امپدانس تونن بصورت زیر می باشد:




15 Comments
hamid
درباره11 سال agoبا سلام منبع این پستتان چه می باشد برای تکمیل کردن اطلاعاتم در مورد موتورهای القایی نیاز دارم ؟
پاسخAdmin
درباره11 سال agoبیشتر پست ها دارای چند منبع می باشند (و اطلاعات شخصی) اگر دقیقاً بگویید که راجع به چه قسمتی اطلاعات می خواهید شاید بهتر بتوانم کمکتان کنم
پاسخhamid
درباره11 سال agoسلام قسمت مدار معادل موتور القایی سه فاز ؟
پاسخAdmin
درباره11 سال agoقسمت مدار معادل از کتاب آقای فیتزجرالد می باشد
پاسخَAlireza
درباره9 سال agoسلام. ممنون از پستتون.واقعا دارای چارچوبی منظم و تمیز و اطلاعاتی مفید هست. سوالی داشتم خدمتتون بنده نیاز دارم Matlab رو به اندازه ای یاد بگیرم تا بتونم پروژه کارشناسی رو که در ارتباط با انواع درایوهاست انجام بدم.میخواستم ببینم آیا منبع مناسبی در نظر دارید تا بتونم تقریبا اطلاعات جامعی رو در این ارتباط بگیرم. سپاس گزارم
پاسخAdmin
درباره9 سال agoکتابی که به شبیه سازی با matlab پرداخته باشد در نظر ندارم و در کتاب ها و مقالات مرتبط با درایوها فقط بلوک دیاگرام روش ها ی کنترلی رسم شده است.
پاسخآتنا
درباره9 سال agoبا سلام و عرض وقت بخیر. بخاطر مطالب عالی و روان و بسیار مفهومی سایت شما بسیار سپاسگزارم. من دو سوال از محضر شما داشتم. 1- دلیل این که روتور اتصال کوتاه می شود چیست؟ 2- چراجریان در لحظه ی اول راه اندازی در روتور بسیار است؟ این به علت بار و لغزش ایجاد شده از اختلاف سرعت چرخش استاتور و روتور است؟ 3- چرا مدار معادل موتور القایی مانند یک ترانسفورماتور است و در لحظه ی اول مانند یک ترانسفورماتور عمل می کند؟اتصال کوتاه شدن روتور تاثیری در این قضیه دارد؟ با تشکر بسیار از شما
پاسخAdmin
درباره9 سال agoساختار روتور در موتور القایی به دو صورت است که در ساختار قفسه سنجاب روتور اتصال کوتاه می شود و باعث القای جریان در روتور شده و میدان دوار تولید می شود. اگر روتور اتصال کوتاه نشود و یا با یک منبع دیگر تغذیه نشود میدان دواری نیز تولید نشده و موتور حرکت نمی کند.
در لحظه اول مقدار لغزش برابر یک است که باعث می شود جریان بسیار زیادی از مسیر روتور عبور کند ولی با افزایش سرعت موتور مقدار لغزش تا نزدیکی صفر کاهش می یابد که باعث می شود مقدار مقاومت مسیر روتور خیلی زیاد شود (مدل IEEE را نگاه کنید) و با عث کاهش کاهش جریان می شود.
یک موتور القایی در اصل یک ترانسفورماتور دوار است که ساختار آن بصورت استوانه ای درآمده است. اتصال کوتاه شدن روتور نیز مانند اتصال کوتاه شدن سمت ثانویه ترانسفورماتور می باشد.
پاسخآتنا
درباره9 سال agoسلام. بسیار سپاسگزارم
پاسخآتنا
درباره9 سال agoبا سلام و عرض وقت بخیر عذر می خوام باز هم از خدمتتون یه سوالی داشتم. مدار ستاره مثلثی که برای مدل روتور و استاتور قرار داده شده صرفا برای مدل قفس سنجابی است یا روتور سیم پیچی شده؟ آیا مرجعی برای این شکل هست؟ من به توضیح مختصری از این شکل با بیان اصل مرجع نیاز داشتم. بسیار بسیار از شما متشکرم که انقدر به سعه ی صدر محبت می کنید
پاسخAdmin
درباره9 سال agoمدار ستاره مثلث که به مدار راه انداز موتور القایی معروف است برای کاهش جریان راه اندازی موتور استفاده می شود. در کتاب های ماشین های الکتریکی توضیح داده شده است.
پاسخاکبر
درباره9 سال agoبنده پروژ راجع به موتور های القئی قفس سنجابی کار میکنم در قسمت شبیه سازی رد سیمولینک نیاز به کم دارم لطفا راهنمایی کنید ممنون
پاسخAdmin
درباره9 سال agoچه مشکلی دارید؟
پاسخفاطمه
درباره3 سال agoسلام منبع این مطالب از کجاست ؟
پاسخAdmin
درباره3 سال agoبا سلام کتاب ماشین های الکتریکی پی سی سن مرجع این مطلب است.
پاسخ