معادلات حالت موتور القایی
یکی از مسائل مهم در رشته های مهندسی، مدل سازی سیستم ها در فضای حالت می باشد. معادلات ماتریسی فضای حالت را می توان بصورت زیر نشان داد:
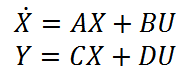
که X ها متغیرهای حالت، Y ها خروجی سیستم و U ها ورودی سیستم می باشد. از این معادلات می توان برای تعیین پایداری سیستم، طراحی کنترل کننده، مشاهدهگر (Observer) و… استفاده کرد.
در این قسمت با جایگذاری راکتانس X و شار دور بر ثانیه ψ بجای اندوکتانس L و شار دور λ در معادلات بدست آمده برای موتور، معادلات حالت موتور القایی را بدست می آوریم. همان طور که اثبات شد معادلات ولتاژ موتور القایی در قاب گردان dq بصورت زیر بدست آمد:
که مقادیر شار نشتی بصورت زیر محاسبه شد:
می توان با جایگذاری معادلات زیر، معادلات بالا را بر حسب راکتانس و شار دور بر ثانیه بدست آورد:
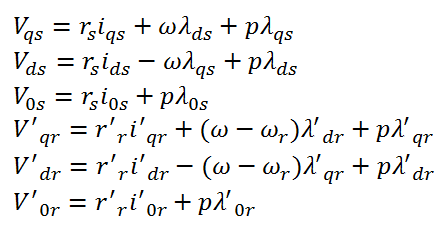
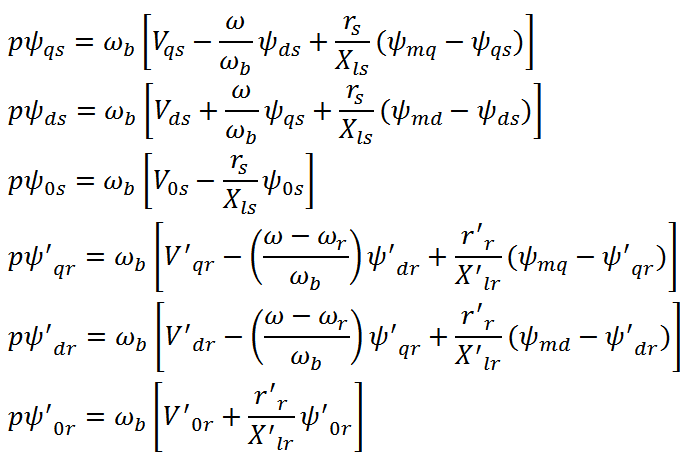
که ωb سرعت زاویه ای الکتریکی پایه بر حسب فرکانس نامی موتور می باشد. معادلات جدید ولتاژ بر حسب راکتانس و شاردور بر ثانیه بصورت زیر تبدیل می شوند:
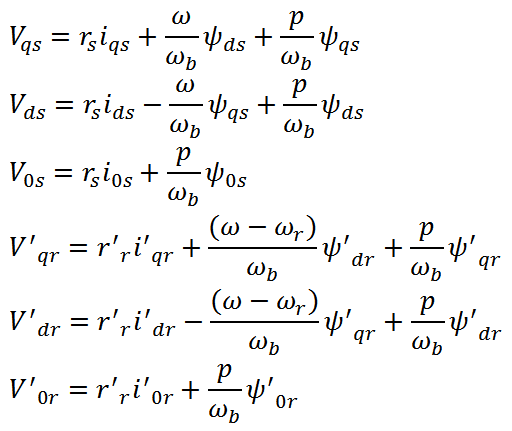
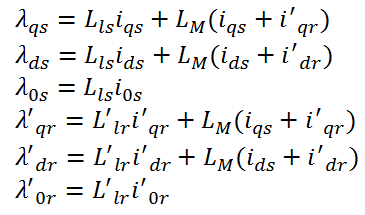
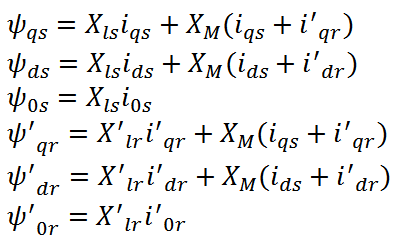
روابط شار نشتی ها نیز بر حسب شار دور بر ثانیه نیز بصورت زیر تبدیل می شود:
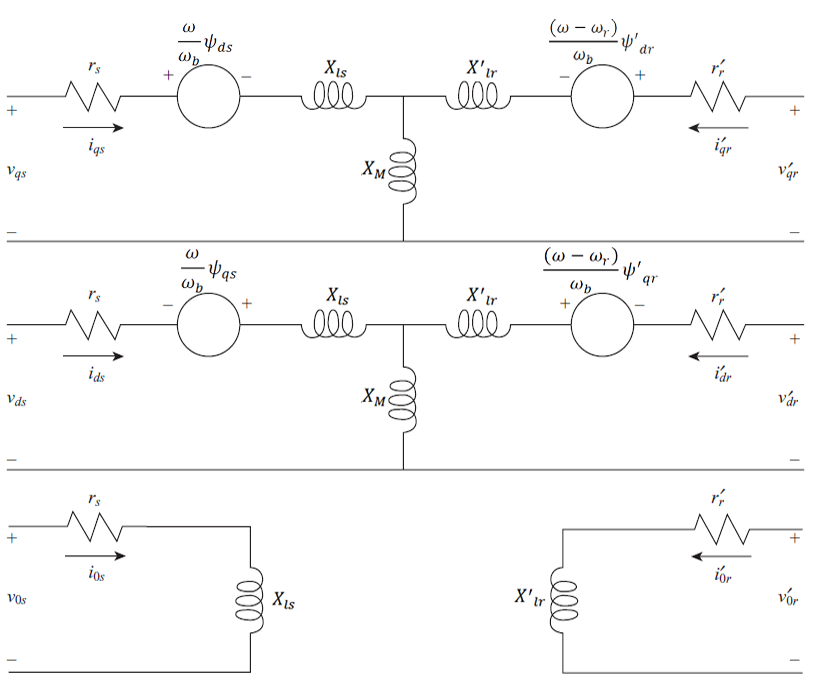
مدار معادل موتور القایی برحسب راکتانس و شاردور بر ثانیه در قاب مرجع dq بصورت زیر می باشد:
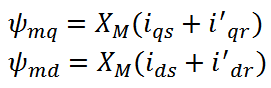
شار دور مغناطیسی محورهای d و q بصورت زیر تعریف می شوند:
حال با جایگذاری این روابط، جریان ها را بر حسب شار دور بر ثانیه ها بدست می آوریم:

جریان های بدست آمده را در معادلات ولتاژ قرار داده و معادلات را بفرم زیر ساده می کنیم:
همان طور که مشخص است روابط بصورت معادلات فضای حالت تبدیل شده است. توجه کنید که معادلات حالت موتور القایی خطی نمی باشند زیرا ضریب ωr با زمان تغییر می کند.
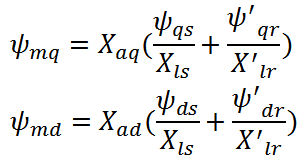
شار دور مغناطیسی محورهای d و q را نیز می توان بصورت زیر نوشت:
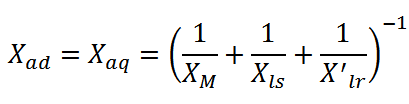
که Xad و Xaq بصورت زیر تعریف می شود:
گشتاور الکتریکی موتور را می توان بصورت زیر محاسبه کرد:

وجود ضریب 3/2 بخاطر همسان سازی توان در دستگاه dq می باشد و P نیز تعداد قطب های موتور می باشد.
تا اینجا معادلات حالت الکتریکی را بدست آوردیم. یک معادله مکانیکی نیز برای محاسبه سرعت روتور باید نوشت. بدین منظور از قانون نیوتن برای جسم دوار استفاده می کنیم. برای حالت موتوری می توان نوشت:
توجه کنید که ωrm سرعت مکانیکی روتور می باشد پس می توان معادله بالا را برحسب پریونیت سرعت بصورت زیر نوشت:
ثابت اینرسی H موتور بصورت زیر تعریف می شود:
پس معادله حرکت بصورت زیر تبدیل می شود:
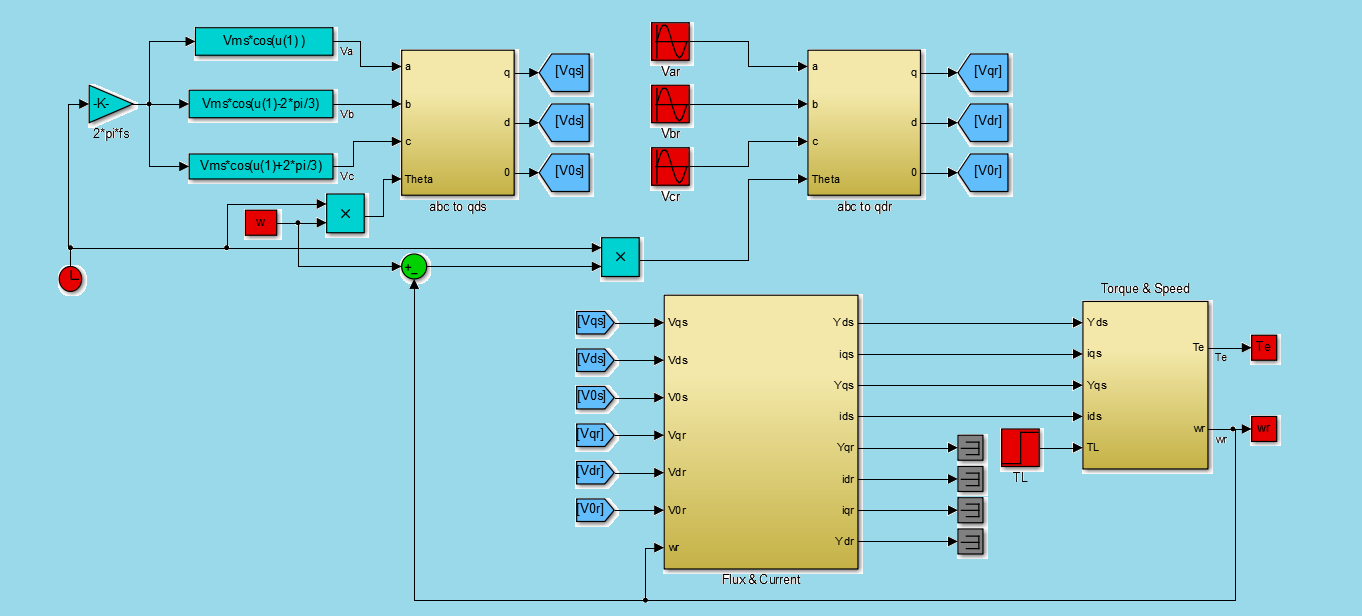
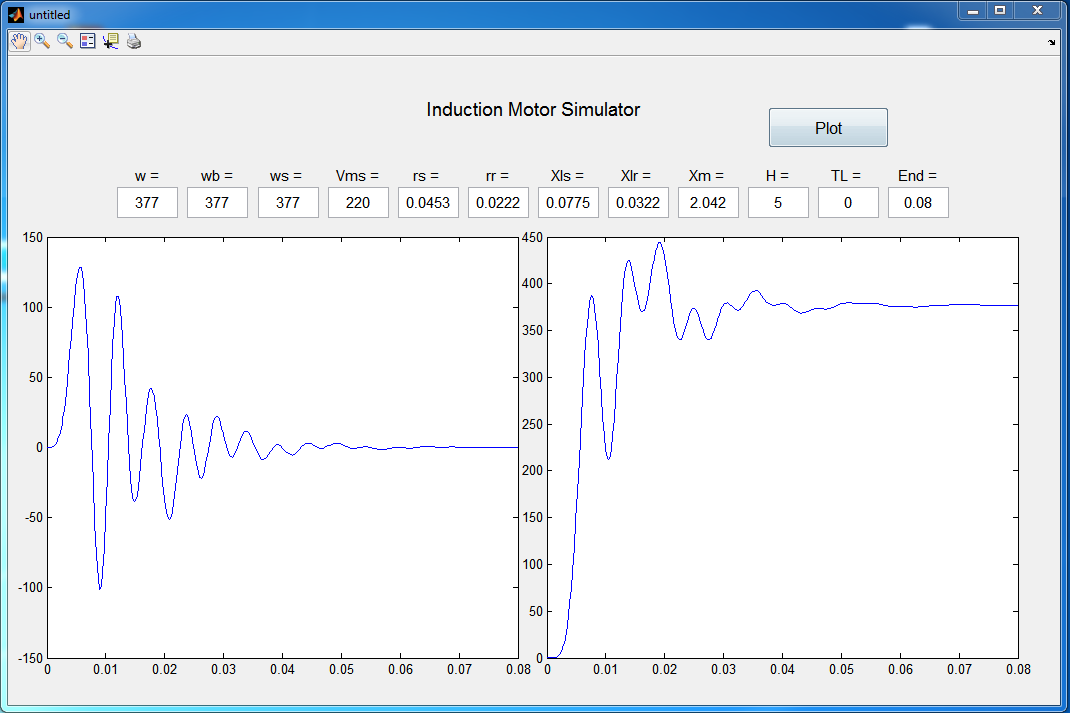
بلوک شبیه سازی شده با Matlab بصورت زیر می باشد:
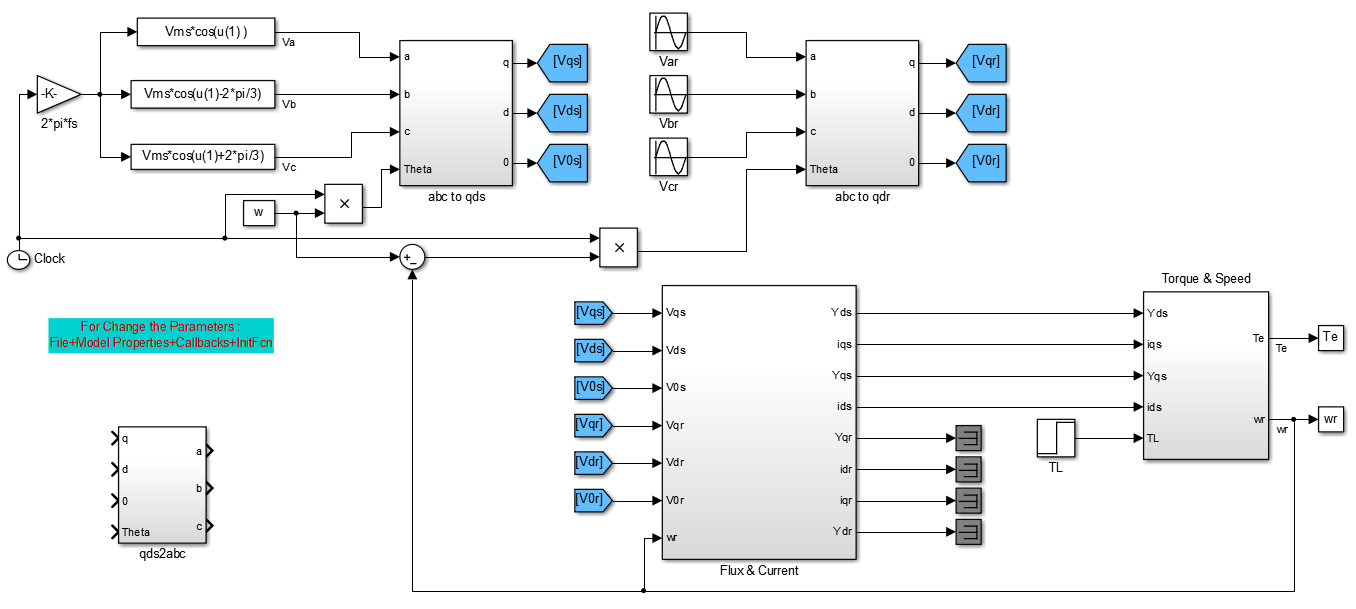
برای دانلود فایل شبیه سازی با نرم افزار Psim بر روی عکس زیر کلیک کنید.
برای دانلود فایل شبیه سازی با نرم افزار Matlab بر روی عکس زیر کلیک کنید.
برای خرید فایل شبیه سازی با GUI نرم افزار Matlab بر روی عکس زیر کلیک کنید.




119 Comments
alireza
درباره10 سال agoبا سلام و خسته نباشید موتور القایی که طراحی آن را انجام داده اید در حالت متقارن می باشد می توان حالت نا متقارن آن را نیز طراحی کنید باتشکر
پاسخAdmin
درباره10 سال agoدر مطالب بعدی حالتهای 2 فاز را شبیه سازی خواهیم کرد
پاسخalireza
درباره10 سال agoبا سلام مقدار پارامترهایی که در موتور القایی گذاشته اید از کجا بدست می یاریم مثل wb - rs - rr- Xls - Xlr - H - TL و دیگر پارامترها پارامترهای یک موتور القایی واقعی را ندارید ؟
پاسخAdmin
درباره10 سال agoپارامترهای واقعی موتورها را می توانید از کاتالوگ شرکت های سازنده موتور استخراج کنید یا برای راحتی به کتاب های مرجع مانند کتاب آقای کراوس یا حتی مدل های آماده موتور در سیمولینک متلب مراجعه کنید.
پاسخalireza
درباره10 سال agoبا سلام منظورم از نامتقارن سه فاز با دامنه های متفاوت و زاویه های متفاوت بود ورودی های ماشین القایی شما سه فاز با دامنه های یکسان و اختلاف فاز 120 درجه می باشد منظورم شبیه سازی ماتریس اپراتور می باشد (تبدیل 3 فاز با دامنه های متفاوت و اختلاف فاز نابرابر) با تشکر و خدا قوت
پاسخAdmin
درباره10 سال agoبرای نامتقارن کردن تغذیه کافی است در بلوک های fcn مربوط به ولتاژهای فازهای a,b,c مقدار Vms را تغییر دهید
پاسخalireza
درباره10 سال agoبا سلام روابط شارهای mq و md را از کجا بدست میاریم و همچنین روابط راکتانس xad یا xaq . چنین رابطی در کتاب تحلیل ماشین های الکتریکی آقای کراوس نیست . ممنون
پاسخAdmin
درباره10 سال agoتمام روابط در کتاب آقای کراوس موجود می باشد.روابط مربوط به xad و xaq در بالا موجود می باشد.توجه کنید که شار مغناطیسی مربوط به محور d از جریان های محور d استاتور و روتور و برای محور q نیز جریانهای محور q استاتور و روتور محاسبه می شود: Saimd=Xm(ids+idr)1 Saimq=Xm(iqs+iqr)2
پاسخalireza
درباره10 سال agoبا سلام طراحی کنترلر موتور القایی را با تولباکس متلب نیز انجام می دهید
پاسخmahdi
درباره10 سال agoسلام می توانید شبیه سازی منبع تغذیه موتور القایی را هم داشته باشید چون منبع تغذیه همیشه دارای حالت سینوسی نمی باشد . در مورد منابع تغذیه موتورهای القایی هم مطلب داشته باشید .
پاسخAdmin
درباره10 سال agoدر پست های بعدی روش های مختلف کلیدزنی را توضیح خواهیم داد
پاسخmohsen
درباره10 سال agoسلام چرا ولتاژ ورودی استاتور بصورت کسینوسی می باشد ولی ولتاژ ورودی روتور سینوسی می باشد ؟ ( برای اتصال کردن موتور القایی به یک کنترل کننده مثل حلقه باز یا بسته v/f وقتی خروجی منبع sorce کنترل کننده به موتور القایی وصل می شود نمودار های خروجی متفاوت می باشند ) یه سوال هم داشتم سرعت نامی موتور همان wb می باشد و چه رابطه ای است بین wb و w=2*pi*f ? ممنونم
پاسخAdmin
درباره10 سال agoموتور القایی بطور جامع و کلی شبیه سازی شده است وگرنه روتور اتصال کوتاه (ولتاژ صفر) می باشد
منظور از wb سرعت نامی می باشد که مقادیر موتور بر حسب آن داده شده است مثلاً یک موتور 50 هرتز مقادیر راکتانس و مقاومت آن در فرکانس 50 هرتز اندازه گیری شده و روی پلاک آن ثبت می شود
در صورتی که اگر مثلاً فرکانس موتور 40 هرتز شود دیگر آن پارامترها صادق نمی باشند
پاسخali
درباره10 سال agoبا سلام چرا خروجی ولتاژهای vqs - vds - vos به صورت خطی می باشد ؟ خروجی ولتاژهای روتور هم به این صورت می باشد ؟ با تشکر
پاسخAdmin
درباره10 سال agoیکی از مزیت های تبدیل dq همین خاصیت dc شدن مولفه ها می باشد
خروجی ولتاژ روتور صفر می باشد چون اتصال کوتاه در نظر گرفته شده است.
پاسخali
درباره10 سال agoبا سلام در این پست و پست مدل موتور القایی در دستگاه DQ معادلات تبدیل abc به qdo را گذاشته اید ولی معادلات بر عکس را نگذاشته اید منظورم تبدیل qdo به abc می باشد لطف کنید این معادلات را بگذارید .(Fqdos به Fabcs) با سپاس
پاسخAdmin
درباره10 سال agoبلوک تبدیل dq به abc(همان بلوکی که چیزی به آن متصل نمی باشد) نیز قرار داده ام.
خود متلب نیز چنین بلوک هایی دارد فقط یه نفر را می خواهد که در قسمت help نرم افزار جست و جو کند
پاسخalii
درباره10 سال agoسلام i0s و i0r را چگونه می شود داشته باشیم؟ آیا با دادن iqs و ids و i0s به بلوک تبدیل qd/abc که گذاشتید می توانیم ias و ibs و ics یعنی جریان های استاتور را داشته باشیم؟
پاسخAdmin
درباره10 سال agoبله بلوک qd/abc کار تبدیل عکس را انجام می دهد. مقادیر جریان های مولفه صفر هم می توان با جمع کردن سه جریان و تقسیم بر 3 کردن نتیجه آن ها را بدست آورد.
پاسخalii
درباره10 سال agoبا تشکر از پاسخ به سوال قبلم ما در اینجا یک rs و rr و Xlr و Xls کلی داریم اگر بخواهیم rsa rsb rsc و rra rrb rrc یعنی مقاومت های هر فاز روتور و استاتور را بطور جداگانه در مدل لحاظ کنیم چه کاری باید انجام داد
پاسخAdmin
درباره10 سال agoتوجه کنید که معادلات بر اساس متقارن و متعادل بودن موتور نوشته شده است.
اگر می خواهید جداگانه پارامترهای موتور را لحاظ کنید باید معادلات را به ترتیب انجام شده بدست آورید.
البته مقالاتی وجود دارند که مسئله نامتعادلی را برای موتور القایی در نظر گرفته اند که می توانید از آنها کمک بگیرید.
پاسخمحمد
درباره10 سال agoبا سلام و تشکر از سایت بسیار خوب شما اگر بخواهیم موتور القایی خطی را مورد بررسی قرار دهیم معادلات به چه صورتی خواهند شد؟ با تشکر فراوان
پاسخAdmin
درباره10 سال agoمعادلات موتورهای خطی به راحتی معادلات موتورهای دوار نمی باشد و معمولاً از روابط الکترومغناطیس پیچیده برای حل موتور خطی استفاده می شود. پیشنهاد می کنم که به کتاب های ماشین مخصوص مراجعه کنید.
پاسخمحمد
درباره10 سال agoبا سلام یک پیغام گذاشتم ولی ظاهرا در سیستم ثبت نشده است. قرار هست من موتور القایی خطی را با استفاده از معادلات آن به صورت دینامیکی در متلب شبیه سازی کنم.. ولی معادلات آن را ندارم مقالات زیادی را نیز خوانده ام ولی به نتیجه خوبی نرسیده ام. اگر راهنمایی ام بفرمائید بسیار متشکر می شوم. با امید پیروزی شما
پاسخAdmin
درباره10 سال agoایمیل خود را چک کنید.
پاسخعلی رضائی
درباره10 سال agoبا عرض سلام لطفا ماشین سنکرون را نیز به همین منوال شبیه سازی نمایید. با تشکر
پاسخMilad
درباره10 سال agoبا سلام برای اینکه بخواهیم سرعت ماشین القایی را با کنترل کنیم دقیقا معادلات حالت آن چه چیزهایی هستند و چه چیزی را باید کنترل کرد تا سرعت یا گشتاور ماشین کنترل شود؟
پاسخAdmin
درباره10 سال agoدر انتها باید ولتاژ و فرکانس اینورتر متصل شده به موتور را کنترل کرد.نحوه کنترل آن هم طبق بلوک دیاگرام های ارائه شده در پست های کنترل موتور القایی می باشد.
پاسخashkan
درباره10 سال agoباسلام و وقت بخیر همین موتور القایی نامبرده رو به صورت کد نویسی دارین؟من واسه انجام دادنش با سیمولینک مشکل ندارم اما میخوام اگه کد نویسی رو دارین با نرم افزار متلب بهم بدین هزینه هم اصلا مهم نیست با تشکر
پاسخAdmin
درباره10 سال agoکدنویسی این پروژه موجود است.از قسمت بالا می توانید سفارش دهید.
پاسخمهناز
درباره10 سال agoسلام من باید معادلات دینامیکی ماشین القایی و dfigرا شبیه سازی کنم راهنماییم میکنید شبیه سازی ماشین القایی همینه که کذاشتید میشه بگید چکار کنم .ممنون
پاسخAdmin
درباره10 سال agoبله شبیه سازی موتور القایی همین است.معادلات DFIG نیز مانند القایی است با این تفاوت که دیگر ولتاژ روتور صفر نمی باشد.
پاسخomid
درباره10 سال agoسلام ممنون از سایت خوبتونمیخواستم بدونم روابط ولتاژ برای روتور را از کجا اورده اید چون کتاب کراس رو خوندم بخش شبیه سازی موتور القایی رو ولی نتونستم پیدا کنم!!
پاسخvali
درباره10 سال agoسلام دوست عزیز اگر بخواهییم همین موتور را به شبکه ieee استاندارد 14 باسه وصل و در مواقع راه اندازی آنرا بررسی کنیم چه کاری باید انجام دهیم لطفا راهنمایی نمایید .
پاسخAdmin
درباره10 سال agoبرای اتصال موتور به شبکه قدرت باید از مدلی که در خود کتابخانه موجود است استفاده کنید.
پاسخپرنیان
درباره10 سال agoسلام، وقتتون بخیر من به رسم جریان های استاتور و روتور در غالب abc نیاز دازم.دقیقا مشابه کتاب کراوس. در یکی از نظرها فرمودین id و iq را به بلوک qd/abc وصل کنیم.ولی وقتی run رو می زنم اتفاقی نمی افته. باید چه کار کنم؟ ممنون میشم راهنماییم کنید
پاسخAdmin
درباره10 سال agoباید theta نیز وصل کنید.
پاسخپرنیان
درباره10 سال agoمن باز هم موفق به کشیدن جریانها نشدم. امکانش هست لطف کنید نحوه ی اتصالات را به ایمیلم ارسال کنید؟
پاسخAdmin
درباره10 سال agoآدرس ایمیل که وارد کرده اید اشتباه می باشد.
پاسخشهاب
درباره10 سال agoبا سلام معادلات مربوط به حالت زمان واقعی ان چگونه تعیین می شوند؟؟
پاسخAdmin
درباره10 سال agoچون این معادلات غیر خطی هستند براحتی نمی توان جوابی برای آن پیدا کرد و باید با هم حل شوند(منظورم روش های عددی است)
پاسخعلی
درباره9 سال agoبا سلام و تشکر از مطالب مفیدتون ، یک سوال مهم: چرا سرعت موتور مدل شبیه سازیتون از رابطه n=120*f/p پیروی نمیکنه؟ چون طبق فرمول باید برابر 188 رادیان بر ثانیه باشه ولی 257رادیان بر ثانیه است. همچنین ، من این مدل رو با پارامترهای موتور خودم تست کردم و متاسفانه باز هم همین مشکل ظاهر شد. لطفا راهنمایی بفرمائید که خیلی برای بنده مهمه پیشا پیش بسیار ممنونم
پاسخAdmin
درباره9 سال agoتوجه کنید که در رابطه n=120*f/p مقدار n سرعت سنکرون (نه سرعت روتور) است و همچنین مقدار 275 نیز سرعت الکتریکی روتور است که برای تبدیل به سرعت مکانیکی باید بر تعداد زوج قطب تقسیم شود.
پاسخعلی
درباره9 سال agoپس از آنجاییکه موتور 4 قطب است و فرکانس 60 هرتز در نتیجه سرعت سنکرن برابر با 188 رادیان برثانیه میشود. ولی باتوجه به فرمایش جنابعالی سرعت مکانیکی 128.5 رادیان برثانیه محاسبه میشود که با سرعت سنکرن موتور حدود 60 رادیان برثانیه اختلاف دارد که اینچنین اختلافی منطقی بنظر نمیرسه ، لطفا دلیل این اختلاف را توضیح میفرمایید. بسیار سپاسگذارم از توجه و وقتی که عنایت فرمودین
پاسخAdmin
درباره9 سال agoسخن شما درست است بررسی می کنم.
پاسخبیتا
درباره9 سال agoسلام وقتتان بخیر اگر رتور به جای قفسه سنجابی ، سیم بندی شده باشد معادلات چه تغییری می کنند؟
پاسخAdmin
درباره9 سال agoمعادلات تغییری نمی کنند. فقط در برخی کاربردها مانند DFIG به سیم پیچی روتور نیز ولتاژ تزریق می شود و دیگر نباید ولتاژهای روتور را صفر قرار داد.
پاسخerfani
درباره9 سال agoبا عرض سلام بنده قصد شبیه سازی موتور القایی به منظور ایجاد فالت های الکتریکی و مکانیکی مانند عدم تعادل فاصله ی هوایی، شکسته شدن میله های روتور دارم. آیا از این مدل می توانم استفاده کنم؟باتشکر
پاسخAdmin
درباره9 سال agoخیر، باید از مدل دیگری که در مقالات است استفاده کرد.
پاسخerfani
درباره9 سال agoبا عرض سلام من مقالات زیادی را مطالعه کردم در این زمینه ولی کمک کننده نبودند شما امکانش هست براتون که لطف کنید توی این زمینه منو راهنمایی کنید؟ با تشکر از شما
پاسخAdmin
درباره9 سال agoدر کدام قسمت مشکل دارید؟
پاسخvali
درباره9 سال agoبا سلام و احترام از سایت و مطالب با حالتون سئوالی داشتم برای تحلیل خطای استاتور در متلب چه کاری باید انجام داد فایلی در این مورد دارین ممنون میشم کمکم کنید.
پاسخAdmin
درباره9 سال agoاگر منظورتان خطای اتصال کوتاه شدن سیم پیچی است باید با استفاده از مقالات موتور را بر اساس معادلات خودتان شبیه سازی کنید. در پروژه های سایت نیز یک موضوع در این رابطه است که می تواند کمکتان کند.
پاسخعلی ناطقی
درباره9 سال agoشبیه سازی بصورت ام فایل موجود نیست؟
پاسخAdmin
درباره9 سال agoبله کدنویسی موتور القایی موجود است و از قسمت سفارش پروژه می توانید اقدام نمایید.
پاسخابوذر پروانه
درباره9 سال agoبا سلام و خسته نباشید من یه پروژه دارم که باید حالت های مختلف نامعتادلی ولتاژ در موتور القایی رو بررسی کنم برا نامتعادلی چیکار باید بکنم جریانهای استاتور رو چطور بدست بیارم از رو فایل شما با تشکر
پاسخAdmin
درباره9 سال agoبرای این کار فقط کافی است که ولتاژ ورودی موتور را تغییر دهید.
پاسخابوذر پروانه
درباره9 سال agoسلام معادلات موتور القایی در حالت نامتعادلی ولتاژ منبع به چه صورت در می آید ؟ اگه میشه فایل شبیه سازی شده که در آن جریانهای استاتور هم وجود دارد برا ایمیلم بفرستید با تشکر
پاسخAdmin
درباره9 سال agoمعادلات موتور همین معادلات است. فقط ولتاژهای منبع را باید نامتعادل کنید. برای جریان های استاتور هم کافی است از تبدیل عکس دو محوری به سه محوری استفاده نمایید.
پاسخمحمد
درباره9 سال agoسلام شکل موج ریان رو هم میشه نشون داد
پاسخAdmin
درباره9 سال agoبله امکان نمایش آن نیز وجود دارد.
پاسخklaris
درباره9 سال agoبا سلام.می خواستم بگم قسمتی که سای دی رو حساب کردید.اشتباه هستش تو شبیه سازی.
پاسخAdmin
درباره8 سال agoممنون.فایل اصلاح شد.
پاسخآتنا
درباره9 سال agoبا سلام و تشکر از شما من در تحلیل ولتاژهای تبدیل یافته در دستگاه dq به مشکل برخورد کرده ام. آیا صفر شدن ولتاژ Vd طبیعی است؟ چون ولتاژ Vq تقریبا 155 ولت شده است. البته به نظرم صفر شدن ولتاژ Vos شاید منظقی باشد. چون مرجع مبدا است و ما بر روی آن قرار گرفته ایم. اما توجیه علمی ای برای اعداد و این نحوه ی تغییر متوجه نشدم خیلی از شما متشکرم
پاسخAdmin
درباره9 سال agoبله منطقی است.توجه کنید که تبدیل dq یک نگاشت است و مقادیر vdq به تابع تبدیل بستگی دارد.
پاسخآتنا
درباره9 سال agoبا سلام و عرض وقت بخیر در مورد تحلیل منحنی گشتاور الکتریکی بر حسب سرعت روتور منحنی ای که رسم می کنم یک شکل بسیار غیر متعارف داره. درصورتی که منحنی هایی که برای هریک از گشتاور و سرعت روتور بدست آورده ام کاملا مشابه شبیه سازی شما است. آیا این چنین منحنی ای نداریم؟
پاسخAdmin
درباره9 سال agoاگر مقدار زمان نمونه برداری را کمتر کنید شکل مورد نظر و صحیحی بدست می آید. شکل های گشتاور - سرعت موتورهای القایی در کتاب کراس موجود است.
پاسخآتنا
درباره9 سال agoسلام و خیلی سپاسگزارم که محبت می کنید و وقت می ذارید و پاسخ سوال های من رو می فرمایید. من باز هم از محضرتون سوالی داشتم. درباره منحنی گشتاور بر حسب سرعت روتور آیا منحنی های رسم شده در کتاب کراوس برای حالت ماندگار نیست؟ چون سرعت و گشتاوری که از این شبیه سازی پلات میشه حالت گذارا است و شاید بشه توجیحی برای بدست آوردن یک شکل نامتعارف با کتاب داشت؟ سوال بعدی که من ممنون میشم بهم راهنمایی بفرمایید راجع به تبدیلات است. در این شبیه سازی که شما محبت کردین و در سایت قرار دادین مستقیم تبدیل پارک زده شده است. اما من در بسیاری از مقالات دیده ام که ابتدا تبدیل کلارک را زده اند و سپس تبدیل پارک. آیا توجیه علمی یا دلیل خاصی داره؟ بسیار متشکر و سپاسگزارم
پاسخAdmin
درباره9 سال agoدر کتاب کراس منحنی های واقعی (منحنی های دینامیکی) موتور رسم شده اند و منحنی های حالت دائم نیستند. در بعضی مقالات شاید از خروجی های تبدیل کلارک در کنترل کننده ای استفاده شده وگرنه نیازی نمی باشد.
پاسخرضا
درباره8 سال agoبا سلام در فایل شبیه سازی شده بالا ورودی، خروجی و ماتریس های A,B,C را لطف کنید مشخص کنید . باتشکر
پاسخAdmin
درباره8 سال agoمعادلات موتور القایی خطی نمی باشد که به راحتی ماتریس های A,B,C,D را بیتوان مشخص نمود. این ماتریس ها متغیر با زمان هستند.
پاسخرضا
درباره8 سال agoبا سلام مرسی از اینکه جواب دادید ورودی و خروجی در فایل بالا دقیقا چه چیزهایی میباشد؟ و اینکه اگر بخواهیم یک کنترل کننده به این سیستم اضافه کنیم باید چطور این کنترل کننده را اعمال کرد؟ باتشکر از شما
پاسخAdmin
درباره8 سال agoورودی ها ولتاژ های استاتور و روتور و همچنین گشتاور بار است و خروجی ها هم معمولا سرعت و یا جریان ها است. در پست های دیگر در مورد کنترل موتور القایی توضیح داده شده است که می توانید به آنها مراجعه کنید.
پاسخامیر
درباره8 سال agoسلام. می خواستم ببینم اگر بخوام این موتور با این مدلی که شبیه سازی کردید رو به یک ترانس و خط انتقال (شبکه) وصل کنم چطور باید عمل کنم؟ باتشکر.
پاسخAdmin
درباره8 سال agoاگر خط انتقال دارای تزویج باشد در کتاب کراس روابط آن داده شده است ولی برای ترانس نمی توانید به این مدل موتوری که شبیه سازی شده است را اضافه نمایید.
پاسخرامین
درباره8 سال agoبا سلام سطر دوم تبدیل پارک درست نوشته شده است؟ یک علامت منفی جا نگذاشته اید؟ سطر دوم تبدیل پارک به این صورت است: [sin(teta) -sin(teta-2pi/3) -sin(teta+2pi/3)- ]
پاسخAdmin
درباره8 سال agoبله درست می باشد. توجه داشته باشید که محورهای dq چگونه قرار گرفته اند.
پاسخرامین
درباره8 سال agoبا تشکر از شما سوال دیگری داشتم. با توجه به اهمیت مقدار ثابت اینرسی H در این معادلات، میخواستم بنده را راهنمایی بفرمایید که مقدار این ثابت اینرسی چگونه محاسبه می شود؟ من با مقایسه رابطه ای که شما برای H نوشته اید با رابطه H که در help متلب است متوجه شدم Pb ظاهرا apparent power است و مقدار ان از حاصلضرب V*I محاسبه می شود. حال سوال بنده این است مقدار این ولتاژ همان Vms است؟ مقدار جریان چطور؟ با تشکر از شما
پاسخAdmin
درباره8 سال agoمنظور از ثابت زمانی اینرسی زمانی است که اگر موتور از محرک خود قطع شود می تواند بار نامی خودش را تامیین نماید.
پاسخامیر
درباره8 سال agoسلام. لطفا بفرمائید چرا موتور القایی با این مدل را نمی توان به یک ترانسفورمر متصل نمود؟ باتشکر.
پاسخAdmin
درباره8 سال agoشاید این کار امکان پذیر باشد. باید به مقالات مراجعه کنید و ببینید که ترانس سه فاز را چگونه می توان مدل کرد. توجه داشته باشید که فازها روی یکدیگر اثر خواهند گذاشت چرا که روی یک هسته پیچیده شده اند.
پاسخامیر
درباره8 سال agoسلام...اگر موتور القایی دو قفسه ای باشد مقدار راکتانس های X21 و X22 را کجای معادلات باید وارد کنم؟
پاسخAdmin
درباره8 سال agoApplications of the current state space model in analyses of saturated induction machines
پاسخE. Levi
امیر
درباره8 سال agoسلام...لطفا مرجعی معرفی کنید که معادلات حالت ژنراتور دو قفسه ای رو داشته باشه می خوام متغیر حالتش جریان باشه نه شار...
پاسخAdmin
درباره8 سال agoApplications of the current state space model in analyses of saturated induction machines
E. Levi
پاسخامیر
درباره8 سال agoسلام...معادلات دیفرانسیل موتور القایی برای تغییرات بزرگ حول نقطه کار اعتبار دارد؟ یا اینکه صرفا برای تغییرات کوچک حول نقطه کار اعتبار دارد.
پاسخAdmin
درباره8 سال agoاین معادلات حالت بطور کلی هستند و اگر حول نقطه کار خطی شوند دیگر نمی توان برای تغییرات بزرگ از آنها استفاده کرد. چون این معادلات هنوز خطی نشده اند پس برای تغییرات بزرگ نیز قابل استفاده هستند.
پاسخabed
درباره8 سال agoسلام خطی سازی موتور فوق را چگونه می توانم بیابم؟
پاسخAdmin
درباره8 سال agoدر کتاب کراس این مدل خطی سازی شده است و می توانید به آن مراجعه کنید.
پاسخomid
درباره8 سال agoسلام خدا قوت ببخشید پسورد فایل با نرم افزار مطلب چیه؟
پاسخAdmin
درباره8 سال agoفایل ها پسوردی ندارند.
پاسخomid
درباره8 سال agoمن اون فایل شبیه سازی با مطلب دانلود کردم موقع باز کردن پسورد میخواد لطفا رسیدگی کنید
پاسخAdmin
درباره8 سال agoهیچکدام از فایل های سایت دارای پسورد نمی باشند و براحتی باز می شوند.
پاسخped
درباره8 سال agosalam chera wr 377 nemishe?
پاسخAdmin
درباره8 سال agoفایل اصلاح گردید.
پاسخReza
درباره8 سال agoبا سلام چرا بعد از تبدیلب پارک ورودیهای سیستم vq=220 و vd=-9.474e-13 شده است؟؟؟؟ و اینکه ورودی محور های d و q روتور صفر شده است برای چه چیزی میباشد؟؟؟ با تشکر از شما
پاسخAdmin
درباره8 سال agoدر تبدیل پارک چون فازها متعادل هستند باید Vq برابر دامنه ولتاژ سه فاز و ثابت باشد و Vd باید صفر شود.
چون روتور اتصال کوتاه می باشد پس محورهای d و q صفر هستند.
پاسخمحمد
درباره7 سال agoسلام امکانش هست همین شبیه سازیو به صورت M-file تو سایتتون قرار بدید. یا اگه میشه ایمیل کنید. ممنون
پاسخAdmin
درباره7 سال agoشبیه سازی موتور القایی بصورت کدنویسی در قسمت پروژه های سایت موجود است و باید از آن قسمت سفارش دهید.
پاسخامیر
درباره7 سال agoسلام. مقدار مولفه d و q ولتاژ روتور چقدره تو معادلات؟ باتشکر.
پاسخAdmin
درباره7 سال agoچون روتور اتصال کوتاه است پس مقادیر ولتاژ محورهای d و q برابر صفر است.
پاسخمحسن
درباره7 سال agoسلام. ببخشید پارامترهای فایل سیمولینک کجا وارد شدند؟ مثلا مقدار TL و سایر پارامترها را از کجا میتونم ببینم و تغییر بدم؟ ممنون.
پاسخAdmin
درباره7 سال agoاز قسمت زیر می توانید پارامترها را تغییر دهید:
File>Model Properties>Callbacks>IniFcn
پاسخامیر
درباره7 سال agoسلام. شرایط اولیه برای متغیرهای حالت رو میخواستم که چه اعدادی باید بذارم؟ ممنونم.
پاسخAdmin
درباره7 سال agoچون موتور از حالت سکون حرکت میکند تمام شرایط اولیه متغیرهای حالت صفر هستند.
پاسخامیر
درباره7 سال agoسلام. میخواستم راه اندازی موتور القایی را با فایل سیمولینک که گذاشتید شبیه سازی کنم. چکار باید بکنم؟ ممنون.
پاسخAdmin
درباره7 سال agoفایل را دانلود و سپس اجرا کنید تا نتایج را ببینید.
پاسخامیر
درباره7 سال agoسلام. اگه سرعت قاب مرجع غیر سرعت سنکرون انتخاب بشه. تاثیرش رو کمیت های ولتاژ و جریان محور dq استاتور و روتور چیه؟ ممنون.
پاسخAdmin
درباره7 سال agoروی کمیت های سه فاز تاثیری ندارد ولی روی کمیت های dq بسته به اینکه چه سرعتی انتخاب می شود ممکن است کمیت ها ثابت و یا نوسانی گردند.
پاسخakbari
درباره7 سال agoسلام فاصله هوایی نامتقارن بین روتور و استاتور را هم میشه رو این شبیه سازی اعمال کرد؟اگر به هر نحوی روتور انحراف پیدا کند
پاسخAdmin
درباره7 سال agoفاصله هوایی نامتقارن روابط خاص خودش را دارد و با این معادلات نمی توان این حالت را شبیه سازی کرد.
پاسخreza
درباره7 سال agoسلام دوتا سوال داشتم ممنون میشم راهنماییم کنید. 1)تو این مدل شبیه سازی بخواهیم به عنوان یک سیستم تک ورودیوتک خروجی برای کترل سرعت تعریف کنیم دقیقا ورودی و خروجی آن چی می شود ؟ 2)بعد این مدل شبیه سازی شده به صورت حلقه باز می باشد؟
پاسخAdmin
درباره7 سال agoسیستم موتور القایی یک سیستم غیرخطی چند ورودی می باشد و نمی توانید به عنوان یک سیستم یک ورودی یک خروجی آن را در نظر بگیرید.
پاسخfarshad
درباره7 سال agoسلام فایل سیمولینکی قرار دادید شبیه سازی هاش با نمودار های کتاب کراوز همخونی نداره ؟ چرا؟
پاسخAdmin
درباره7 سال agoاگر نتایج دقیق تر میخواهید بهتر است که با ام فایل شبیه سازی را انجام بدهید:
https://motodrive.ir/downloads/%d8%b4%d8%a8%db%8c%d9%87-%d8%b3%d8%a7%d8%b2%db%8c-%d8%b1%d8%a7%d9%87-%d8%a7%d9%86%d8%af%d8%a7%d8%b2%db%8c-%d9%85%d9%88%d8%aa%d9%88%d8%b1-%d8%a7%d9%84%d9%82%d8%a7%db%8c%db%8c-%da%a9%d8%aa%d8%a7%d8%a8
پاسخامیر
درباره4 سال agoسلام. این مدل قفسه سنجابی هست یا روتور سیم پیچی ؟
پاسخAdmin
درباره4 سال agoمدل هر دو نوع ساختار می باشد.
پاسخمحمد
درباره4 سال agoسلام و عرض وقت بخیر آقا چرا در این شبیه سازی نمودار گشتاور سرعت درست در نمیاد؟
پاسخAdmin
درباره4 سال agoبا سلام شکلی که قرار داده شده است پس از اجرای شبیه سازی فایل شبیه سازی بوده است.
پاسخ