طراحی کنترل کننده با تولباکس Matlab (بخش اول)
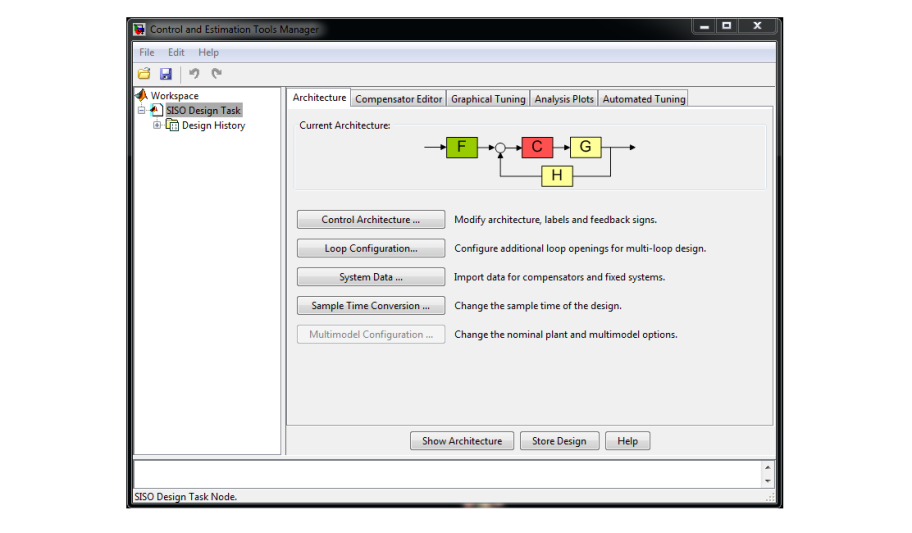
همان طور که می دانید یکی از مهمترین قسمتهای کنترل یک فرآیند انتخاب نوع کنترل کننده و همچنین تنظیم آن می باشد. تولباکس (Toolbox) تنظیم سیستم کنترلی متلب محیطی مناسب برای طراحی کنترل کننده و مشاهده رفتار سیستم می باشد. در این قسمت قصد آموزش یکی از مهم ترین تولباکس های نرم افزار Matlab یعنی تولباکس Control System Tuning را برای طراحی کنترل کننده داریم. شکل زیر محیط این تولباکس را نشان می دهد:
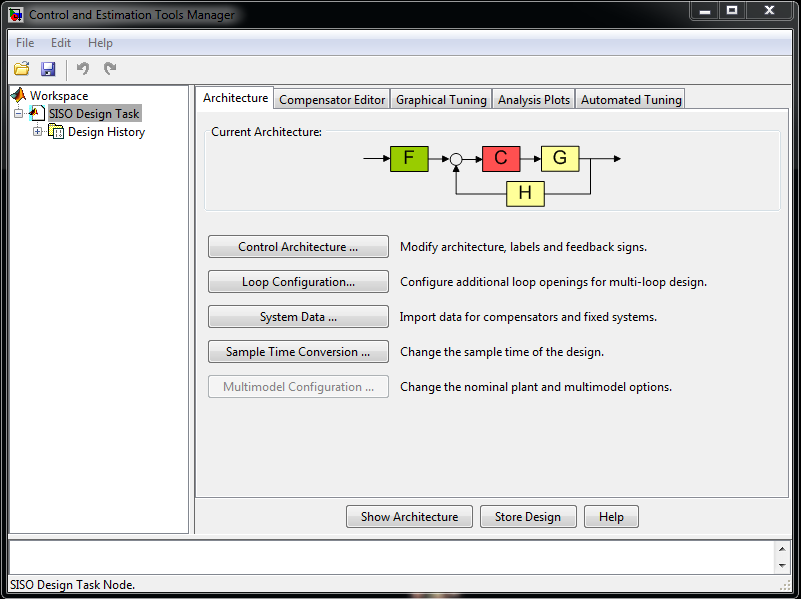
همان طور که مشخص است این تولباکس از 5 قسمت تشکیل شده است:
- محیط تعیین ساختار سیستم (Architecture)
- محیط ویرایش جبرانساز (Compensator Editor)
- محیط گرافیکی تنظیم (Graphical Tuning)
- محیط آنالیز منحنی ها (Analysis Plots)
- محیط تنظیم اتوماتیک (Automated Tuning)
همان طور که مشخص است در قسمت ساختار، بلوک دیاگرام کلی یک سیستم نشان داده شده است:
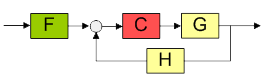
که F تابع پیشفیلتر، C تابع جبرانساز (کنترل کننده)، G تابع تبدیل سیستم (Plant) و H تابع تبدیل فیدبک می باشند. قسمت ساختار برای کارهای زیر مورد استفاده قرار می گیرد:
- تغییر دادن ساختار بلوک دیاگرام
- پیکربندی حلقه ها
- وارد کردن مدل
- تعیین زمان نمونه برداری
- پیکر بندی چند مدل
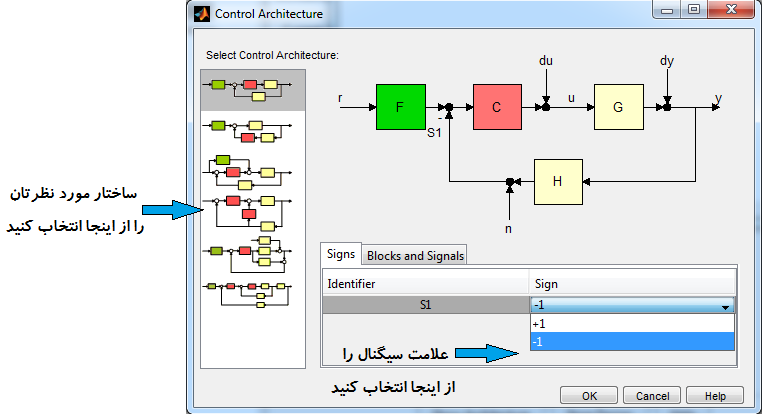
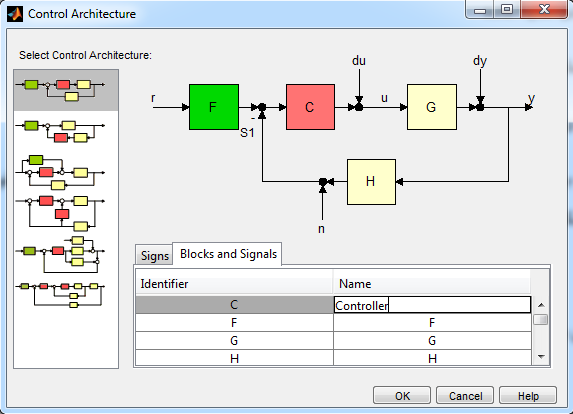
با کلیک بر روی گزینه Control Architecture می توانید ساختار بلوک دیاگرام و علامت بلوک ها را مطابق شکل زیر تغییر دهید:
هم چنین برای تغییر دادن نام بلوک ها روی تب Blocks and Signals کلیک کنید:
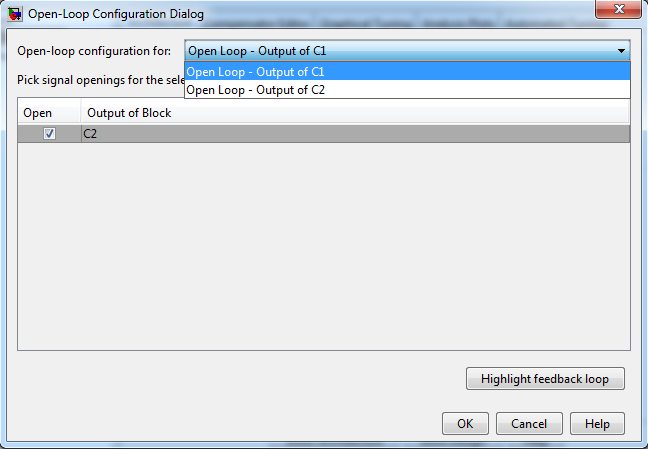
اگر ساختار شما دارای چند حلقه و کنترل کننده می باشد و می خواهید تاثیر کنترل کننده ای ای را بر روی حلقه فیدبک از بین ببرید می توانید با انتخاب گزینه Loop Configuration و انتخاب جبرانساز مورد نظر اثر آن را حذف کنید:
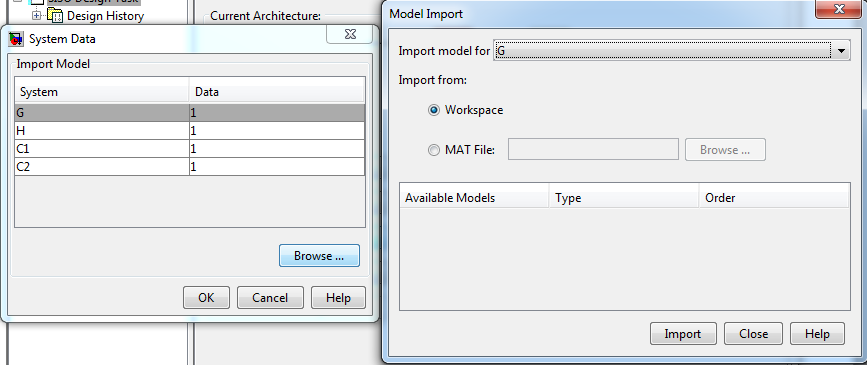
اگر از قبل تابع تبدیل قسمت های مختلف را ایجاد کرده اید می توانید با کلیک بر روی گزینه System Data فایل خود را انتخاب و وارد محیط کنید:
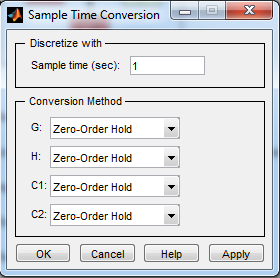
برای تعیین زمان نمونه برداری روی گزینه Sample Time Conversion کلیک کرده و مقدار آن را مشخص کنید. در این قسمت می توانید انواع نگهدارنده مرتبه صفر،یک و… را برای قسمت های مختلف سیستم مشخص کنید:
اگر مدل آماده ای که وارد کرده اید خود دارای چند مدل باشد گزینه Multimodel Configuration فعال بوده و می توانید تنظیمات مربوط به آن را انجام دهید.
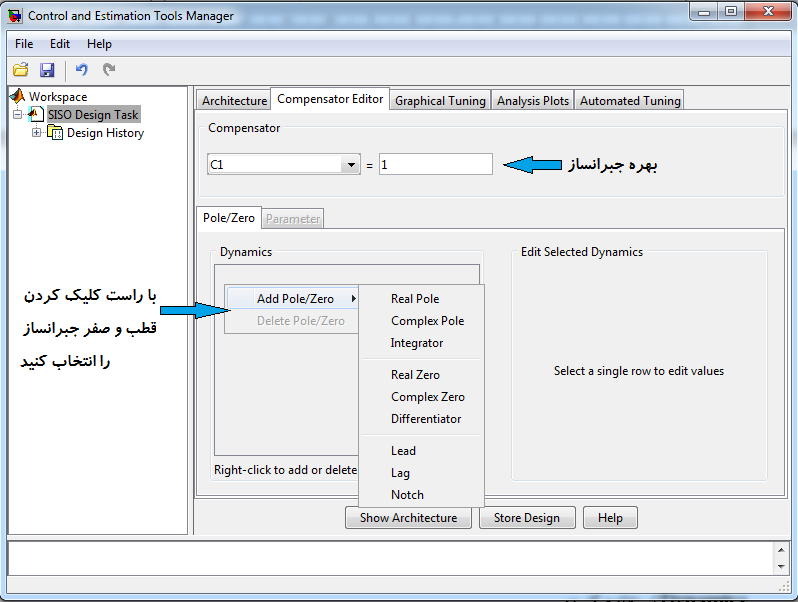
تا الآن ساختار سیستم کنترلی را تعیین کردیم. حال با استفاده از قسمت ویرایشگر جبرانساز می توانیم بهره، صفر و قطب برای جبرانساز تعیین نماییم. برای این کار بر روی Dynamics راست کلیک کرده و با انتخاب صفر یا قطب آن را به جبرانساز اضافه می کنیم:
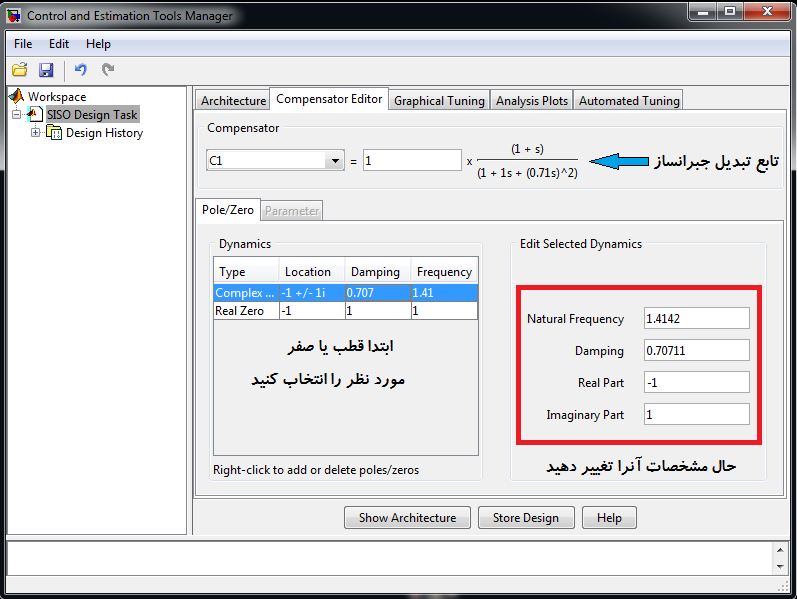
برای تغییر دادن مختصات قطب یا صفر می توانید پس از انتخاب آن، از قسمت Edit Selected Dynamics استفاده کنید:
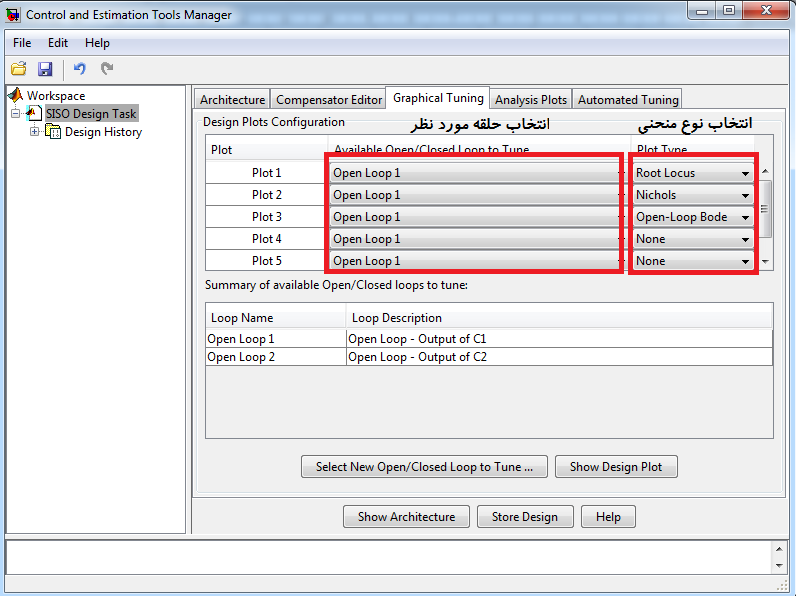
از قسمت Graphical Tuning می توانید منحنی هایی که برای طراحی استفاده می کنید را انتخاب کنید:
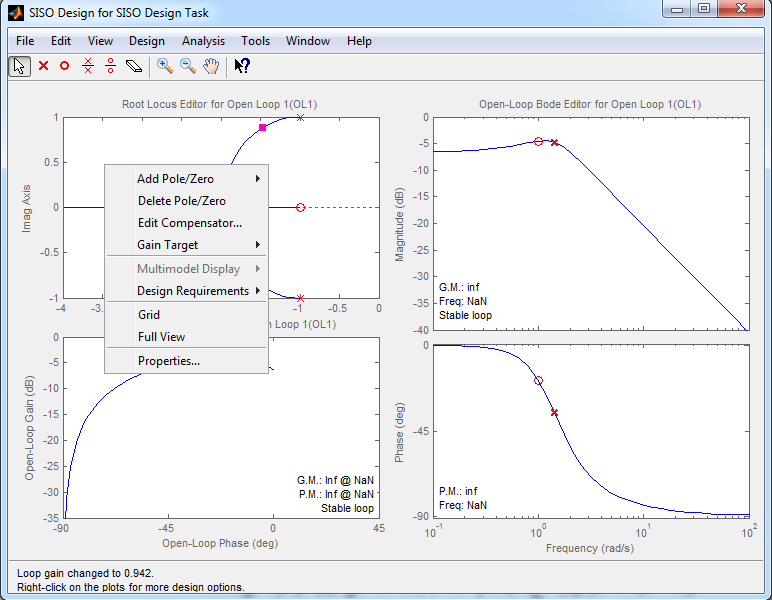
برای مشاهده محیط طراحی روی گزینه Show Design Plot کلیک کنید. با تغییر مقادیر مربوط به جبرانساز منحنی های محیط SISO Design Task بصورت خودکار بروز می شوند. همچنین می توانید با کشیدن صفرها و قطب ها روی منحنی بصورت دلخواه پارامترهای جبرانساز را تغییر دهید یا با راست کلیک کردن بر روی منحنی ها می توانید صفر و قطب اضافه کنید:
توجه کنید که برای پاسخ سیستم حلقه باز سه منحنی زیر موجود می باشد:
- منحنی روت لوکاس (Root locus)
- منحنی نیکولز (Nichols)
- منحنی بود (Bode)
و برای پاسخ سیستم حلقه بسته فقط منحنی بود (Bode) وجود دارد.
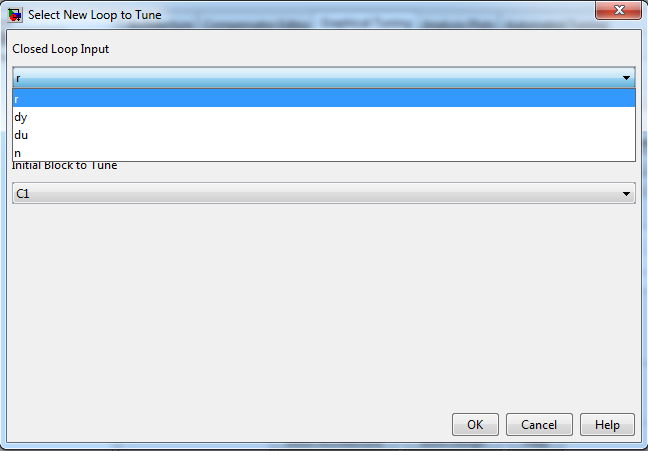
اگر می خواهید مثلاً بجای پاسخ ورودی به خروجی، پاسخ نویز به ورودی را در نظر بگیرید با کلیک بر روی گزینه Select New Open/Closed Loops to Tune می توانید حلقه مورد نظر را انتخاب کنید:
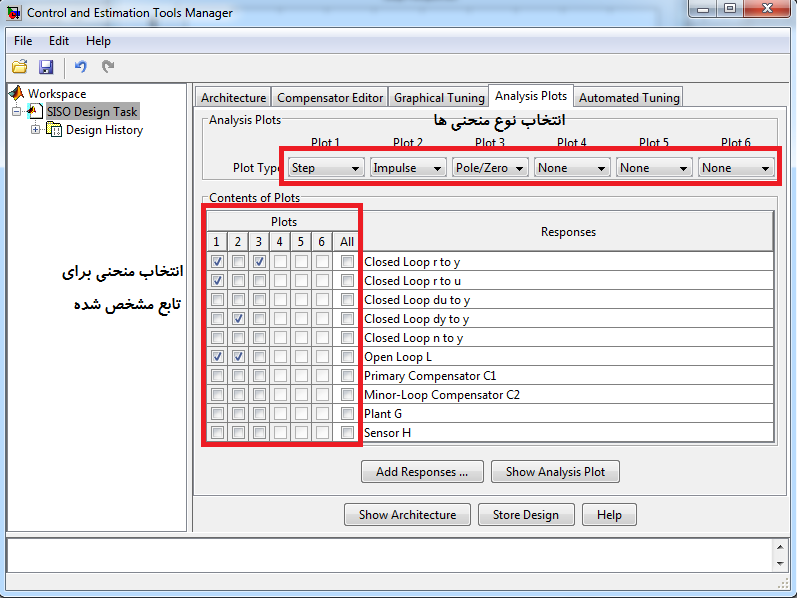
در قسمت Analysis Plots می توانید حداکثر 6 منحنی مختلف برای مشاهده پاسخ حلقه های مختلف انتخاب کنید و با کلیک بر گزینه Show Analysis Plot منحنی های مورد نظر نشان داده می شود:
برای تنظیم کردن پاسخ سیستم وارد قسمت Automated Tuning می شویم:
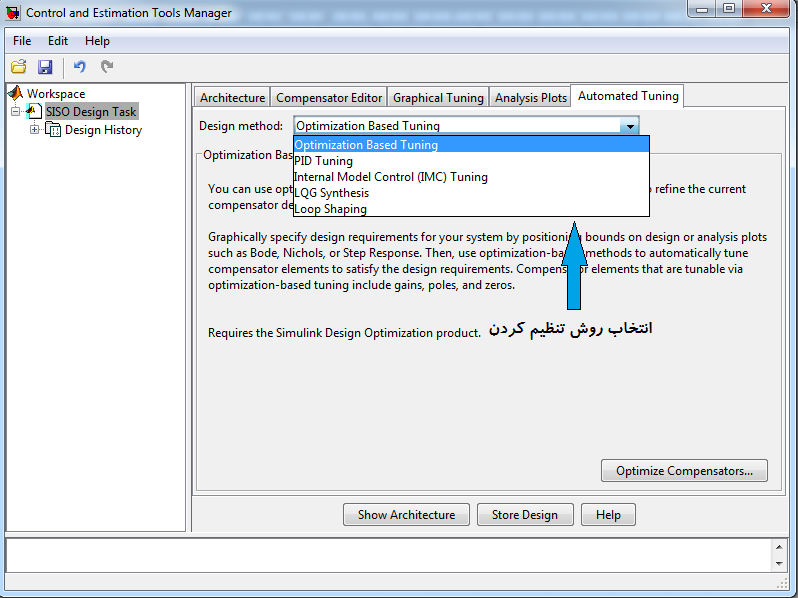
همان طور که مشخص است برای تنظیم کردن 5 روش زیر وجود دارد:
-
تنظیم بر اساس بهینه سازی (Optimization-Based Tuning): در این روش پارامترهای جبرانساز بر اساس نیاز با روش های بهینهسازی تنظیم می شود.
-
تنظیم کنترل کننده PID : در این روش با انتخاب نوع کنترل کننده و روش تنظیم کردن (روش کلاسیک یا روش زمان پاسخ مقاوم)، جبرانساز تنظیم می شود.
-
تنظیم به روش کنترل مدل داخلی (IMC) : در این روش با استفاده از روش طراحی IMC یک فیدبک پایدارکننده طراحی می شود.
-
تنظیم به روش (LQG) : در این روش یک فیدبک پایدارکننده بر اساس دنبال کننده LQG طراحی می شود.
-
تنظیم به روش (Loop Shaping) : در این روش با استفاده از پهنای باند حلقه باز یک فیدبک پایدارکننده طراحی می شود.
برای هر روشی که انتخاب می کنید باید مراحل زیر را انجام دهید:
-
انتخاب جبرانساز
-
مشخص کردن رفتار مورد نظرتان برای پاسخ سیستم
-
کلیک بر روی گزینه Update Compensator برای اعمال تنظیمات بر روی جبرانساز
در قسمت بعدی نحوه تنظیم کردن با این روش ها را توضیح می دهیم.




6 Comments
صادق
درباره10 سال agoسلام خسته نباشی واقعا کاربردی دقیق و مفید توضیح دادی از سایتت لذت بردم سایتهایی مثل سایت شما که کاربردی باشه خیلی کمه به کارتون ادامه بدید
پاسخperson
درباره9 سال agoبسیار خوب بود خسته نباشید
پاسخhadis
درباره9 سال agoسلام میتونیم برای یک سیستم mimo هم از این روش استفاده کنیم؟
پاسخAdmin
درباره9 سال agoامتحان نکردم ولی فکر نکنم مشکلی داشته باشد.
پاسخمریم
درباره8 سال agoسلام ببخشید اگر سیستم کنترل آبشاری باشد(cascade) با وجود دو کنترلر باید نوع هر کنترلر را در چه قسمتی وارد کرد؟ومنحنی پاسخ فرایند را میتوان از کجا مشاهده کرد؟
پاسخAdmin
درباره8 سال agoباید از قسمت انتخاب نوع ساختار ابتدا گزینه آخر را انتخاب کنید.
پاسخ