تستهای موتور القایی
در این قسمت با ارئه یک مثال نحوه محاسبه پارامترهای موتور القایی توسط تستهای موتور القایی شرح داده می شود. فرض کنید برای یک موتور القایی سه فاز 60Hz سیم پیچی شده با اتصال ستاره اطلاعات زیر داده شده است:
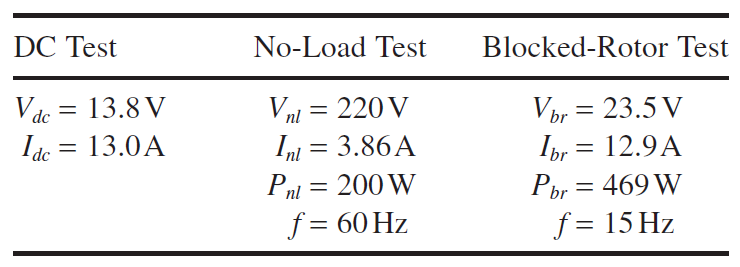
در این قسمت با ارئه یک مثال نحوه محاسبه پارامترهای موتور القایی توسط تستهای موتور القایی شرح داده می شود. فرض کنید برای یک موتور القایی سه فاز 60Hz سیم پیچی شده با اتصال ستاره اطلاعات زیر داده شده است:
در یک موتور القایی سه فاز با توجه به مدار معادل، نحوه توزیع توان بصورت زیر است:
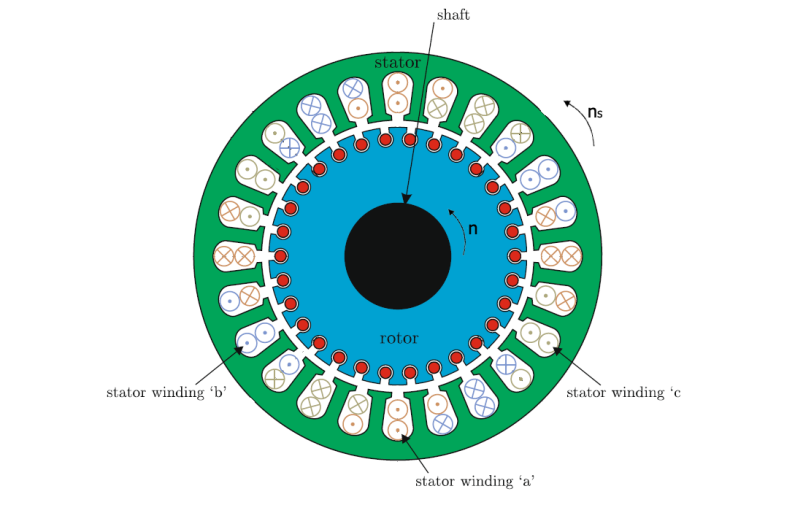
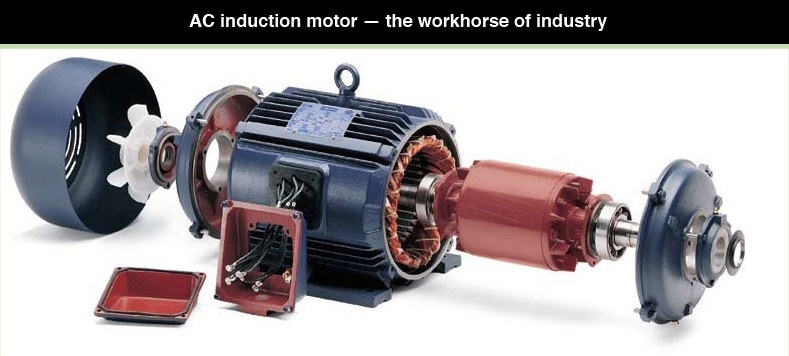
موتورهای القایی بخاطر طراحی ساده و پایدار, بهای ارزان, هزینه نگه داری پایین و اتصال آسان به منبع AC از پرکاربردترین موتورها در صنایع است. این موتورها از یک قسمت ساکن به نام استاتور و یک قسمت دوار به نام روتور ساخته شده اند که روتور بر روی محور نصب بوده و درون استاتور می چرخد. استاتور به یک منبع AC سه فاز متصل شده و باعث ایجاد یک میدان گردان می شود. این میدان گردان باعث القاء جریان درون روتور گشته و باعث می شود که روتور به دنبال میدان استاتور با سرعت کمتر بچرخد. به همین دلیل نام دیگر این موتورها، موتور آسنکرون (غیرهمزمان) می باشد.
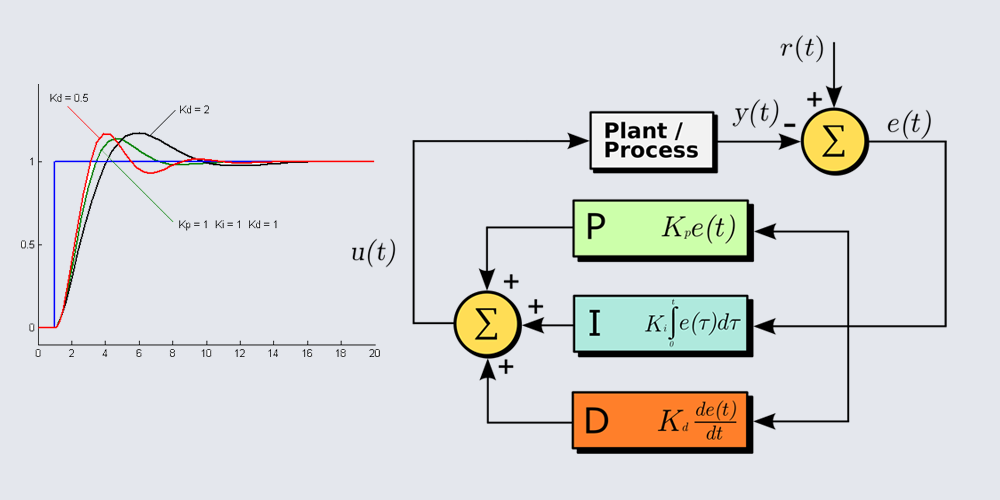
در قسمت قبل بلوک کنترلی ماشین DC توضیح داده شد. مشکل کنترل حلقه باز، تغییر سرعت موتور با تغییرات بار یا ولتاژ منبع می باشد بنابراین به سراغ کنترل حلقه بسته می رویم. از جمله کنترل کننده های حلقه بسته کنترل کننده PID می باشد. مسئله مهم در این کنترل کننده ها نحوه تنظیم ضرایب کنترل کننده های PID می باشد بطوری که هم سرعت پاسخ دهی افزایش یابد و هم مقدار فراجهش کاهش یابد. برای ورود به این بحث با توجه به شکل زیر ابتدا باید تعاریف کنترلی زیر را در نظر بگیریم:

سایت موتودرایو در جهت آموزش مطالب رشته برق راه اندازی شده است. هدف این سایت تولید محتوای تخصصی برای دانشجویان علاقه مند به رشته برق بوده و همچنین در راستای آموزش برنامه نویسی نرم افزار متلب و کاربرد آن در رشته برق قدم بر داشته است.


