کنترل کننده سرعت تطبیقی خودتنظیم برای موتور مغناطیس دائم
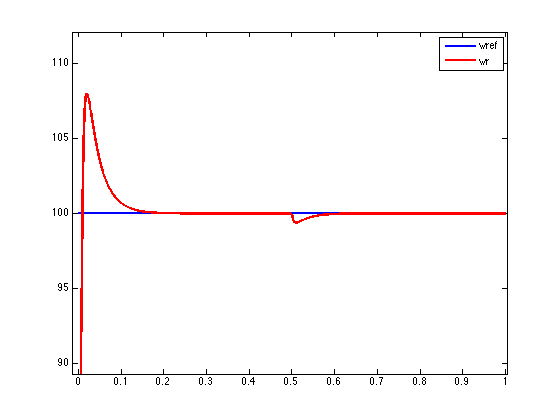
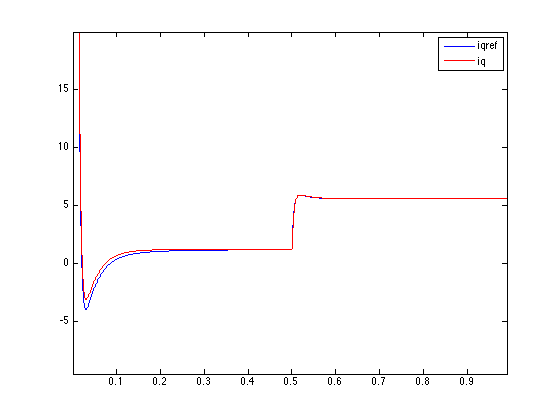
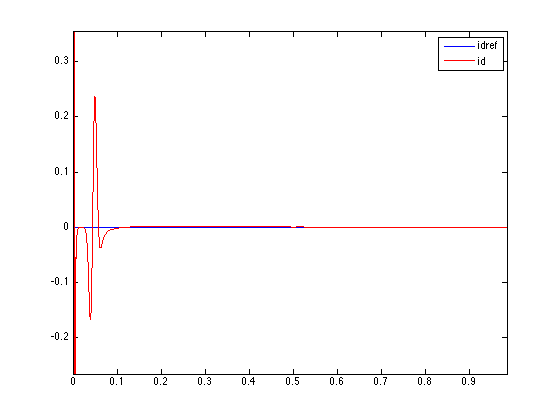
در این شبیه سازی یک کنترل کننده تطبیقی خودتنظیم (Self-tuning) برای کنترل موتور مغناطیس دائم طراحی شده است. این شبیه سازی در محیط simulink انجام شده است. برخی از نتایج شبیه سازی در زیر نشان داده شده است:
برای خرید کنترل کننده سرعت تطبیقی خودتنظیم برای موتور مغناطیس دائم بر روی لینک زیر کلیک کنید:




No Comments