نحوه تنظیم کنترل کننده PI موتورهای DC
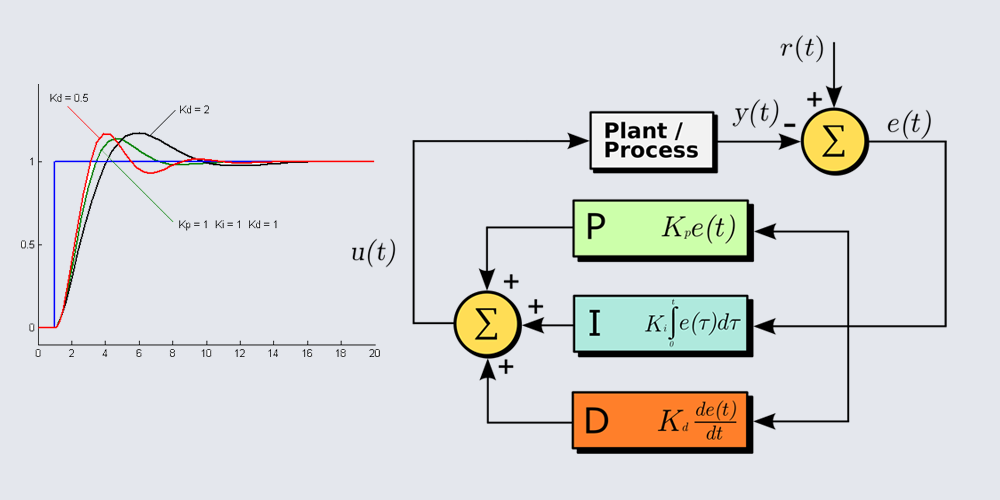
در قسمت قبل بلوک کنترلی ماشین DC توضیح داده شد. مشکل کنترل حلقه باز، تغییر سرعت موتور با تغییرات بار یا ولتاژ منبع می باشد بنابراین به سراغ کنترل حلقه بسته می رویم. از جمله کنترل کننده های حلقه بسته کنترل کننده PID می باشد. مسئله مهم در این کنترل کننده ها نحوه تنظیم ضرایب کنترل کننده های PID می باشد بطوری که هم سرعت پاسخ دهی افزایش یابد و هم مقدار فراجهش کاهش یابد. برای ورود به این بحث با توجه به شکل زیر ابتدا باید تعاریف کنترلی زیر را در نظر بگیریم:



