معادلات حالت ماشین سنکرون
در این مقاله به بررسی معادلات حالت ماشین سنکرون می پردازیم پس با ما همراه باشید.
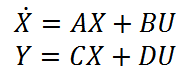
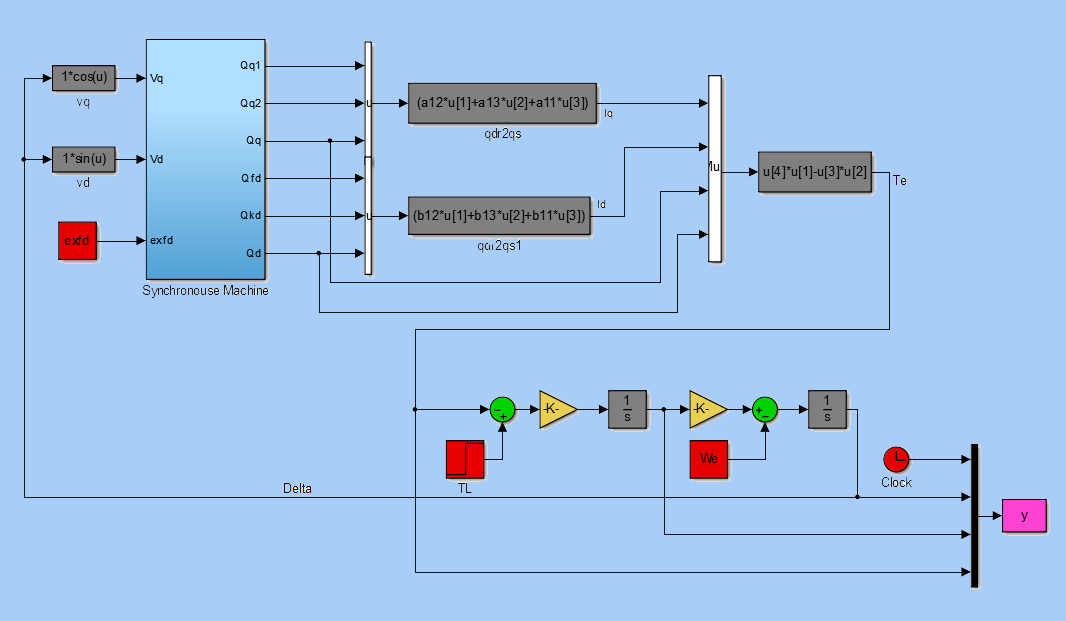
همان طور که اشاره شد برای بررسی رفتار ژنراتور سنکرون استفاده از مدل ساده (مدل حالت دائمی) کارآمد نیست بنابراین معادلات آن را در دستگاه dq بدست آوردیم. حال برای شبیه سازی معادلات باید آنها را بصورت معادلات حالت تبدیل کنیم: