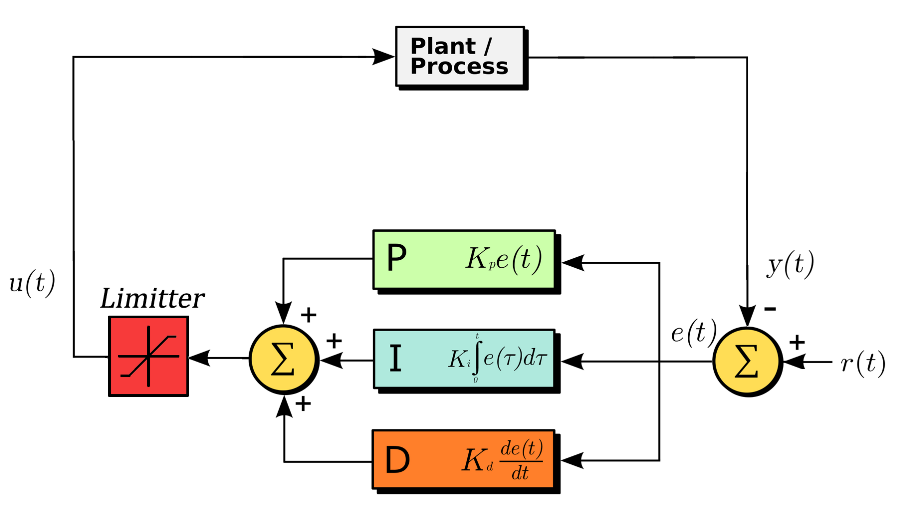
اشباع کنترل کننده ها
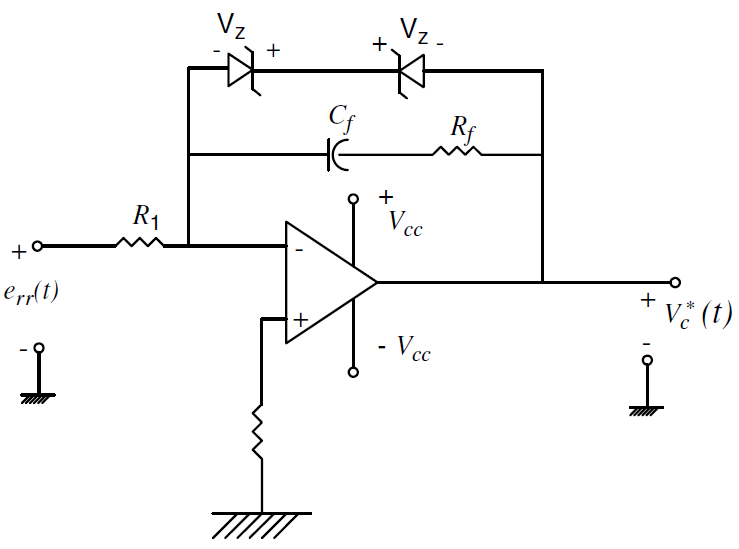
در بیشتر فرآیندهای صنعتی نباید مقادیر پارامترهای سیستم بیشتر از مقادیر نامی شوند و پارامترها دارای حد بالا یا پایین یا به اصطلاح دارای اشباع می باشند. برای مثال در یک موتور اگر مقدار جریان موتور بیشتر از مقدار نامی شود باعث می شود که سیم پیچی موتور بسوزد. از آنجایی که گشتاور موتور با جریان آن رابطه مستقیمی دارد پس باید در کنترل موتور مقدار گشتاور را محدود به گشتاور نامی موتور کرد. چون مقدار گشتاور نتيجه خروجی كنترل كننده (PID) سرعت می باشد پس باید برای اعمال محدودیت گشتاور، مقدار خروجی کنترل کننده باید محدود شود. برای محدود سازی کنترل کننده می توان از مدار ساده زیر استفاده کرد:
در بسیاری از فرآیندها فرمان کنترل کننده از سقف اشباع بالاتر می رود و چون کنترل کننده ها دارای محدویت می باشد در عمل حلقه فیدبک کارایی خود را از دست می دهد.
عاملی که بیشترین تاثیر در به اشباع رفتن کنترل کننده دارد ترم انتگرال گیر کنترل کننده می باشد. بخاطر عمل انتگرال گیری، خطا روی هم انباشته شده و ممکن است از حد اشباع عبور کند. به این فرآیند جمع شوندگی یا Windup گفته می شود.
اگر جلوی جمع شوندگی گرفته نشود چون زمان زیادی نیاز است تا خطای منفی جمع گردد و اثر جمع شوندگی را از بین ببرد پاسخ سیستم خیلی کند شود و کنترل کننده نمی تواند ورودی را دنبال کند.
روش های زیادی برای جلوگیری از جمع شوندگی (Anti-windup) ارائه شده است که به دو صورت آنالوگ و دیجیتال قابل پیاده سازی می باشد.
ایده اصلی تمام روش های Anti-windup این است که زمانی که کنترل کننده به اشباع می رود، چون انتگرال گیری از خطا تاثیری ندارد پس بهتر است که انتگرال گیر خاموش شود. بصورت دیجیتالی کافی است که اگر مقدار خروجی کنترل کننده از ماکزیمم خود بیشتر شد مقدار انتگرال گیر را صفر کنیم.
روش های Anti-windup بسیاری ارائه شده است که در این قسمت به تعدادی از آنها اشاره خواهیم کرد.
روش اول:
همان طور که از شکل زیر مشخص می باشد در این روش از خروجی انتگرال گیر یک فیدبک گرفته شده است:
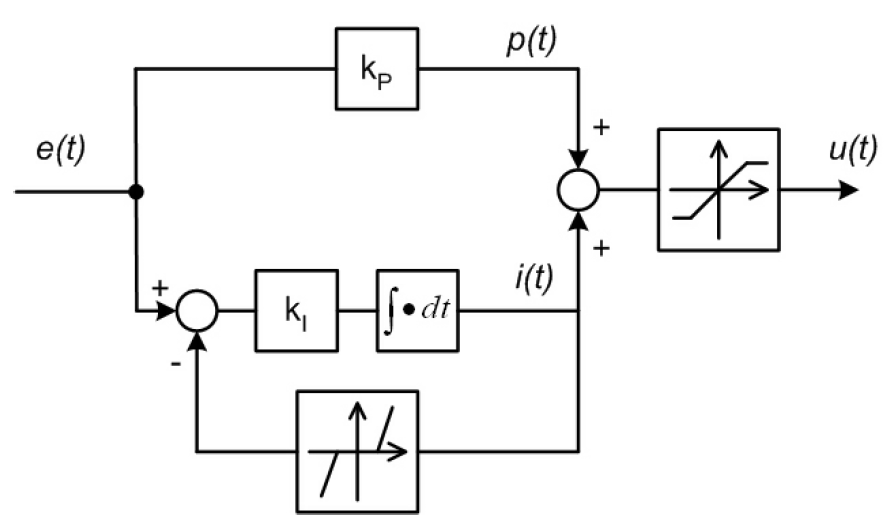
اگر مقدار خروجی انتگرال گیر از حد آستانه ای بالاتر رود بلوک زیر انتگرال گیر فعال شده و بصورت فیدبک مقدار انتگرال گیر را کاهش می دهد. مقدار بهره فیدبک خیلی زیاد می باشد تا جلوی انباشتگی را سریع کاهش دهد. این روش یکی از معروف ترین روش های Anti-windup می باشد.
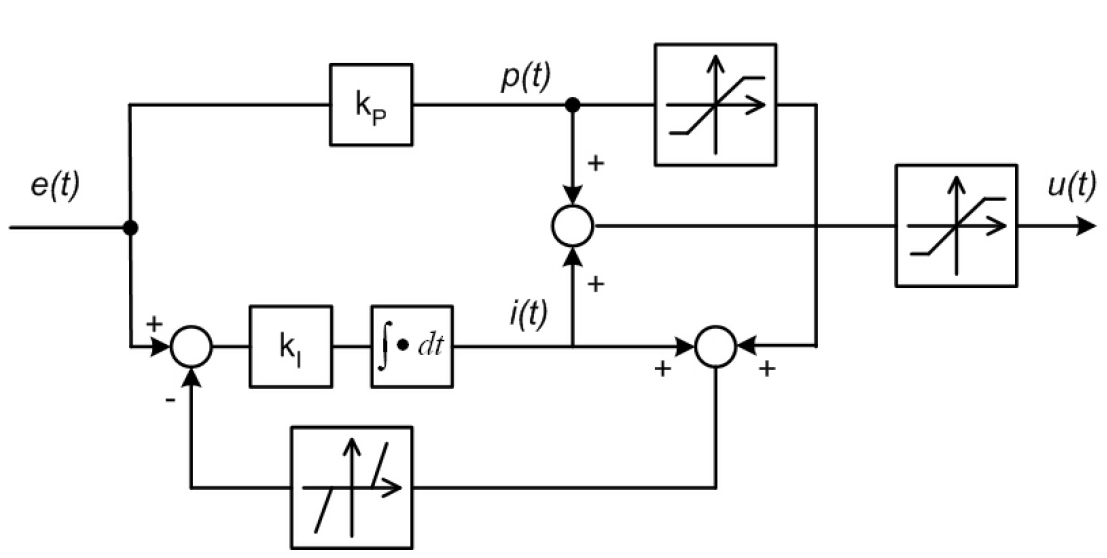
روش دوم:
این روش مانند روش بالا می باشد با این تفاوت که هم از ترم انتگرال گیر و هم ترم تناسبی فیدبک می گیرد:
روش سوم:
یکی از مشکلاتی که روش بالا دارد این است که ممکن است بهره ترم تناسبی زیاد باشد و باعث شود که مدار فیدبک زود فعال شود. برای رفع این مشکل بلوک زیر پیشنهاد شده است:
همان طور که مشخص است تاثیر ترم تناسبی محدود شده است.
روش چهارم:
به این روش در اصطلاح روش Clamping هم گفته می بلوک دیاگرام این روش بصورت زیر می باشد:
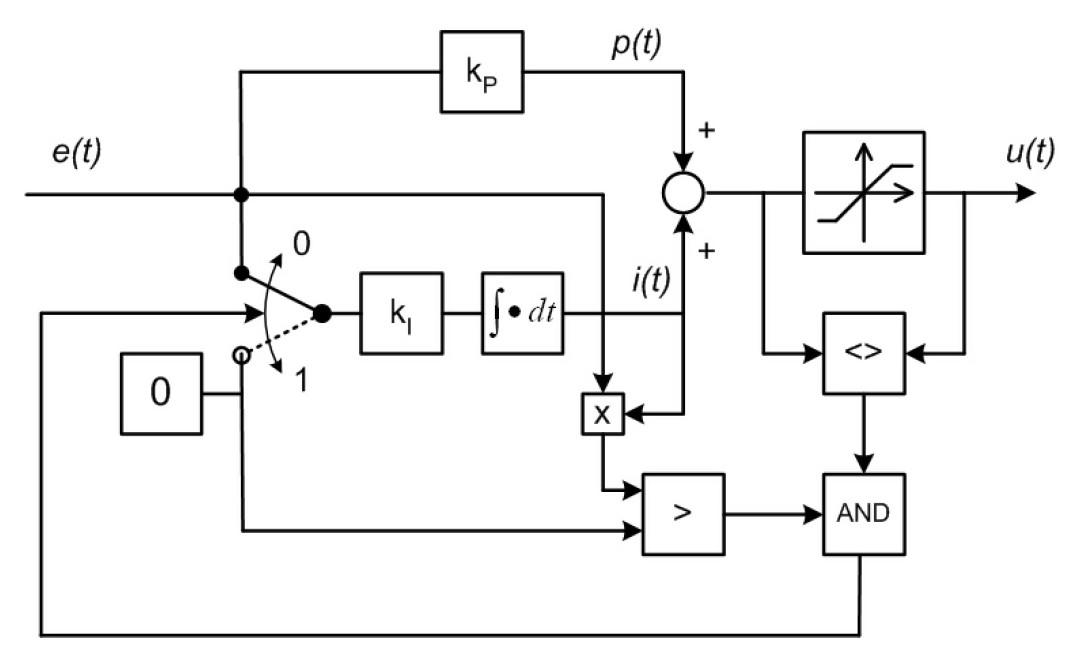
شرط جلوگیری از عملیات انتگرال گیری بصورت زیر می باشد:

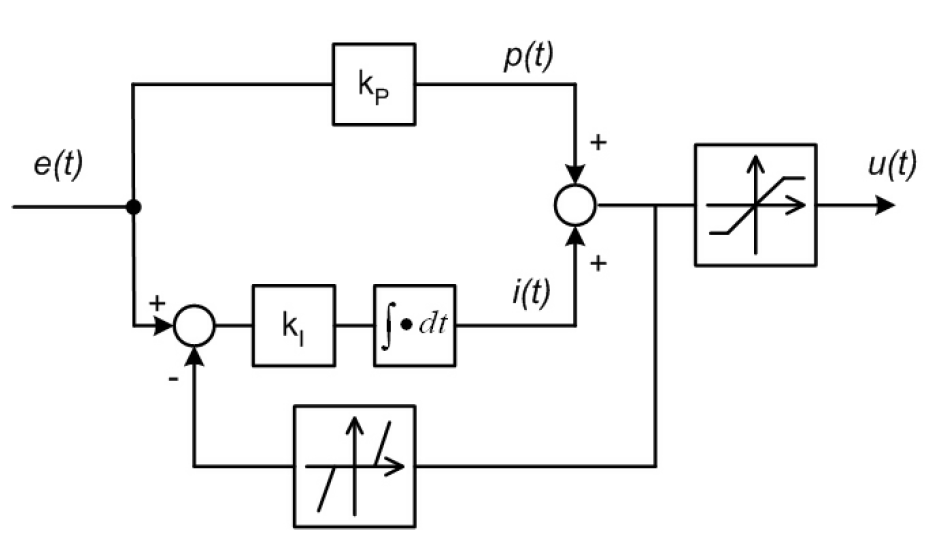
روش پنجم:
این روش از معروف ترین روش های Anti-windup می باشد که بصورت بازگشتی عمل می کند. بخاطر همین به این روش محاسبات بازگشتی یا Back Calculation نیز می گویند:
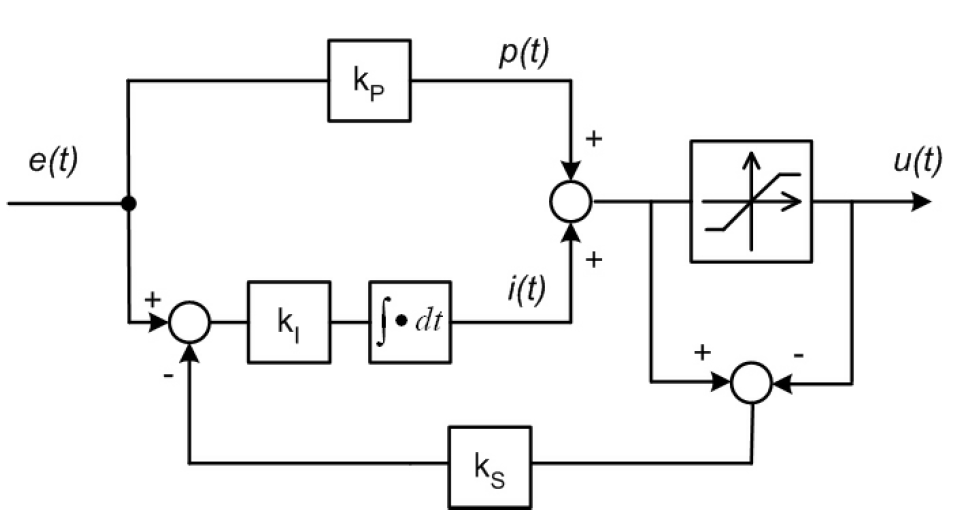
این روش بر روی بسیاری از فرآیندها عملکرد خوبی از خود نشان داده است. مقدار بهره ks را بصورت (1/kp) تنظیم می کنند. اگرچه برای بهبود عملکرد سیستم پیشنهاد شده است که مقدار بهره ks را 1/3 تا 3 برابر kp تنظیم کرد.
در نرم افزار متلب برای قرار دادن حد اشباع بر روی کنترل کننده PID پس از ورود به پنجره تنظیمات کنترل کننده از قسمت PID Advanced بصورت زیر می توانید حدود بالا و پایین کنترل کننده را تنظیم کنید:
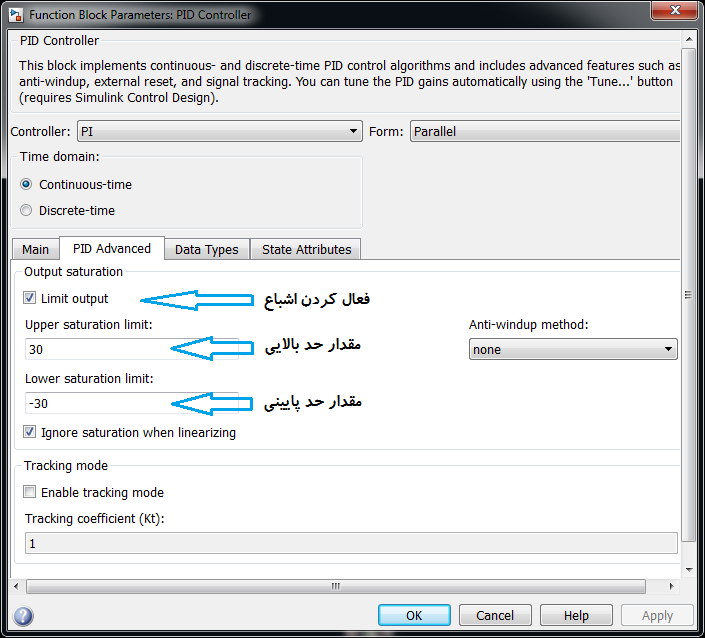
همچنین دو روش Anti-windup نیز وجود دارد که می توانید انتخاب کنید:
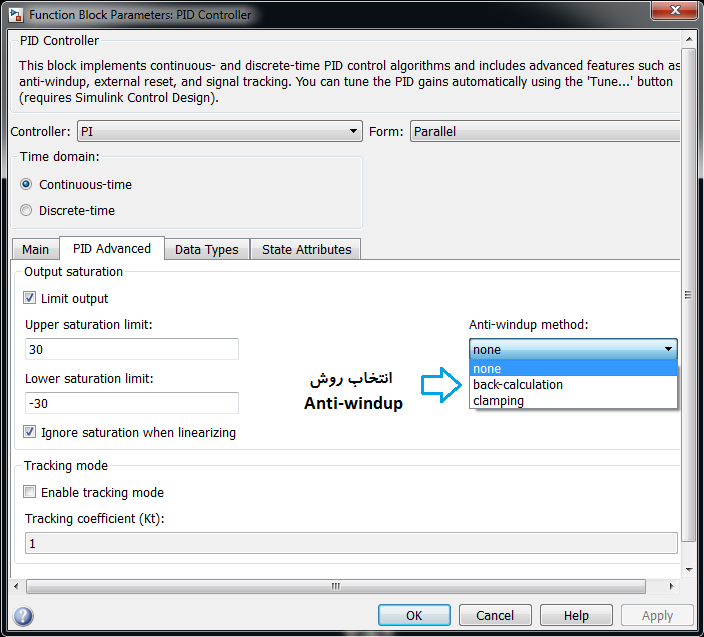
اگر روش back-calculation را انتخاب کنید می توانید مقدار بهره آن (kb) را نیز مشخص کنید. روش Clamping همانند روش چهارم می باشد.




9 Comments
ali
درباره11 سال agoسلام PID مخفف چه کلماتی می باشد ؟
پاسخAdmin
درباره11 سال agoP مخفف کلمه Proportional به معنی تناسبی می باشد.
I مخفف کلمه Integral به معنی انتگرال گیر می باشد.
D مخفف کلمه Derivative به معنی مشتق گیر می باشد.
پاسخهما
درباره10 سال agoخیلی خوب بود
پاسخhadis
درباره10 سال agoسلام ممنون از مطلب مفیدی که گذاشتین من با تمام روشهای بالا تو سیستم خودم امتحان کردم ولی جواب نگرفتم یعنی خروجی مسیر مرجع را ردیابی میکنه ولی در مقیاس خیلی کوچکتر شما چه پیشنهادی دراین؟
پاسخAdmin
درباره10 سال agoبعضی مواقع به نوع سیستم نیز وابسته می شود. اگر سیستم خاصی را موردنظر دارید بهتر است که به مقالات مرتبط مراجعه کنید.
پاسخالهه
درباره8 سال agoبا سلام ممنون از متن بالا من در این خصوص ارائه دارم در مورد چرا PID اشباع شده و چطوری از طریق ANTI windup مشکل رفع شده است مطلب در این خصوص از کجا میتونم دانلود کنم با تشکر
پاسخAdmin
درباره8 سال agoباید از مقالات مربوطه استفاده کنید.
پاسخelahe
درباره8 سال agoبا سلام ممنون از متن بالا من در این خصوص ارائه دارم در مورد چرا PID اشباع شده و چطوری از طریق ANTI windup مشکل رفع شده است مطلب در این خصوص از کجا میتونم دانلود کنم با تشکر
پاسخAdmin
درباره8 سال agoباید به مقالات مربوطه مراجعه کنید. اگر هم کتاب می خواهید می توانید به کتاب زیر مراجعه کنید:
Modern Anti-windup Synthesis:
پاسخControl Augmentation for Actuator Saturation