روش های کنترل موتور القایی (بخش اول)
همان طور که قبلاً اشاره شد مهمترین مزیت های موتور القایی در مقابل موتور DC ساختار ساده، راندمان بالاتر، قیمت کمتر و رنج توان بالاتر می باشد. در مقابل مهمترین حسن موتورهای DC در مقابل موتورهای القایی کنترل راحتتر و دقیقتر این موتورها می باشد.
روش های زیادی برای کنترل موتور القایی پیشنهاد شده است که بطور کلی می توان روش های کنترل موتور القایی را بصورت زیر دستهبندی کرد:
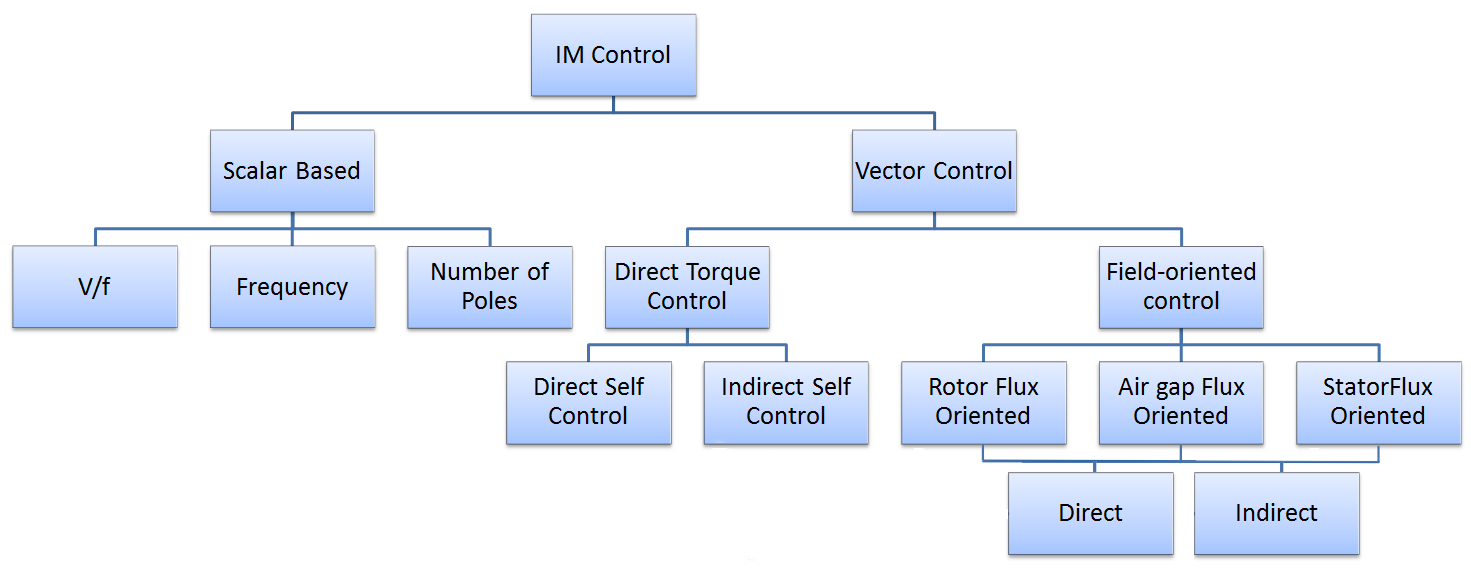
روش های کنترل اسکالر معمولاً سادهتر و ارزانتر و در مقابل دارای محدودیت رنج کنترل سرعت می باشند. روش های کنترل برداری پیچیدهتر و گرانتر می باشند ولی می توانند سرعت موتور را از سرعت صفر تا بالاتر از سرعت نامی موتور بطور دقیق کنترل کنند.
در این قسمت می خواهیم انواع روش های کنترل اسکالر را توضیح بدهیم.
همان طور که قبلاً اشاره شد سرعت روتور بصورت زیر قابل محاسبه می باشد:

که fs فرکانس تغذیه موتور،P تعداد قطب های موتور و s لغزش موتور می باشند.
همان طور که از رابطه بالا مشخص است برای تغییر سرعت موتور می توان سه پارامتر fs و P و s را تغییر داد.
کنترل سرعت با تغییر لغزش:
برای تغییر s می توان یک مقاومت در روتور (برای موتورهای القایی سیم پیچی شده) مانند شکل زیر اضافه کرد که با تغییر آن منحنی گشتاور سرعت تغییر کرده و سرعت موتور نیز تغییر می کند:
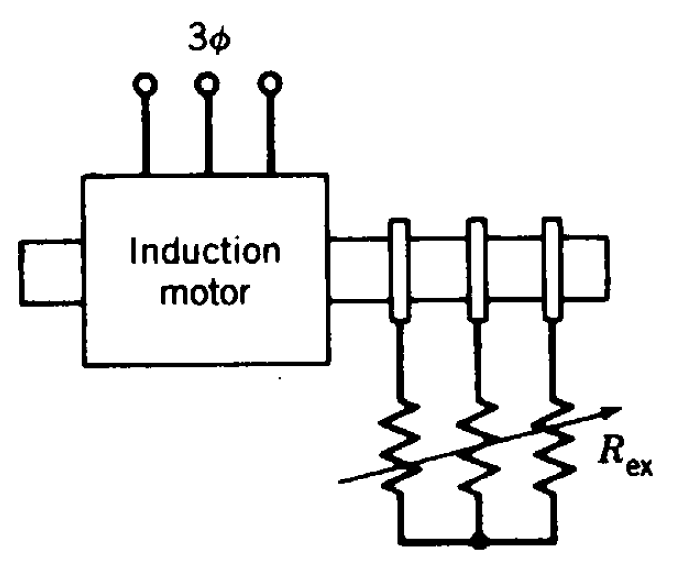
در قدیم معمولاً از رئوستا استفاده می شد ولی امروزه از مقاومت استاتیکی استفاده می شود. چون اضافه کردن مقاومت باعث ایجاد تلفات می گردد پس بازده موتور کاهش پیدا می کند. بنابراین از این روش کمتر استفاده می شود.
کنترل سرعت با تغییر قطب:
همان طور که از رابطه میدان استاتور مشخص است سرعت با تعداد قطب رابطه عکس دارد. بنابراین می توان با استفاده از چند سیم پیچی با تعداد قطب های مختلف در استاتور بجای یک سیم پیچی به سرعت های مختلف دست یافت. مثلاً اگر دو سیم پیچی 6 و 8 قطبی داشته باشیم در فرکانس 50 می توان به دو سرعت 1000 و 750 دور بر دقیقه دست یافت.
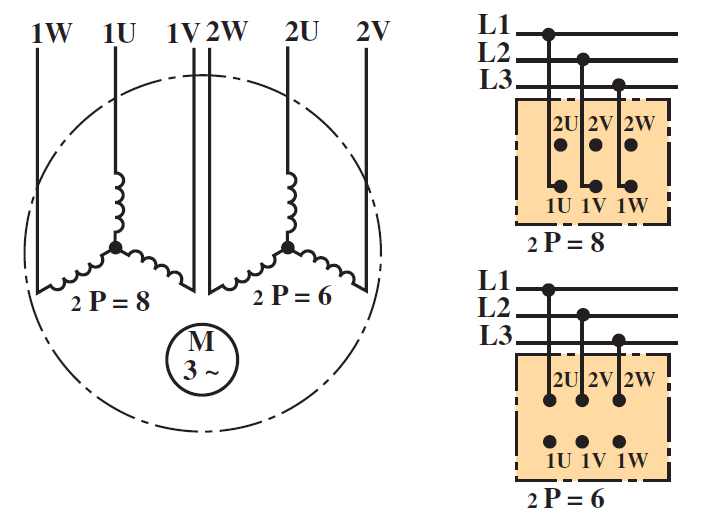
توجه کنید که در این روش تغییرات سرعت پیوسته نمی باشد و فقط می توان چند سرعت گسسته داشت. همچنین این روش باعث کاهش بازده ماشین شده و هزینه آن را افزایش می دهد.
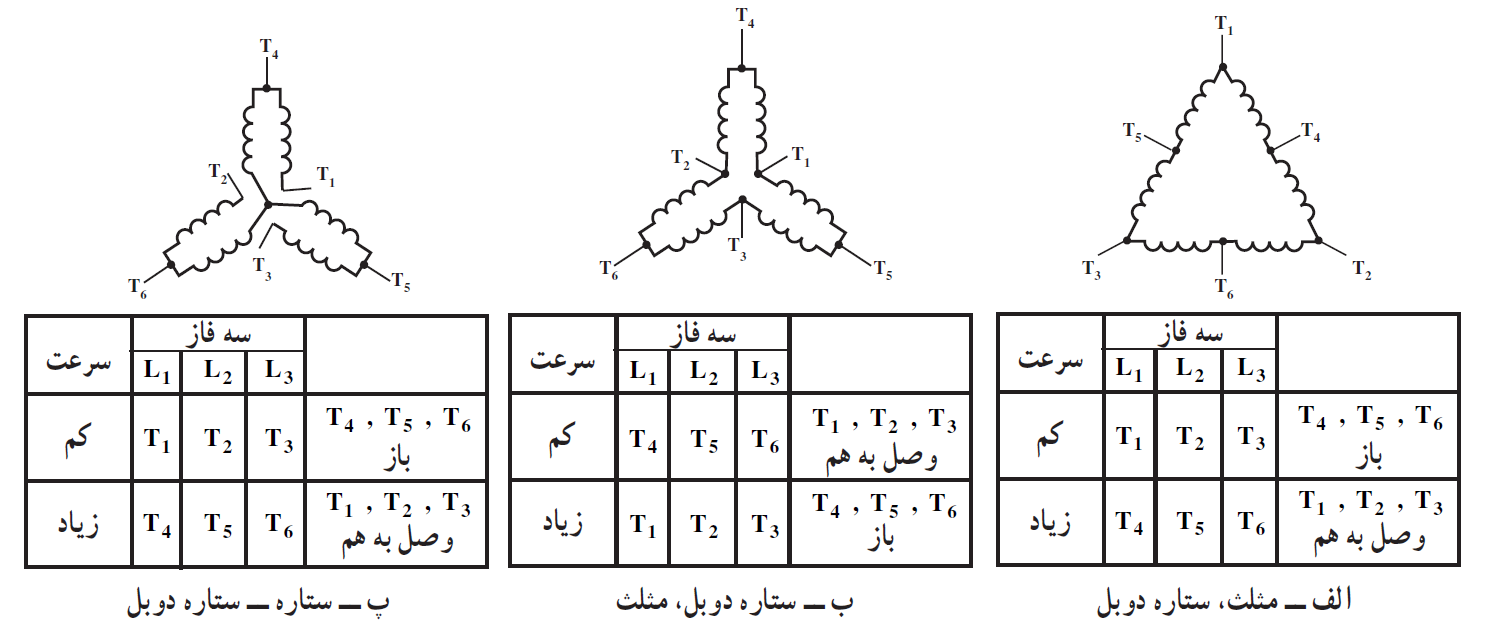
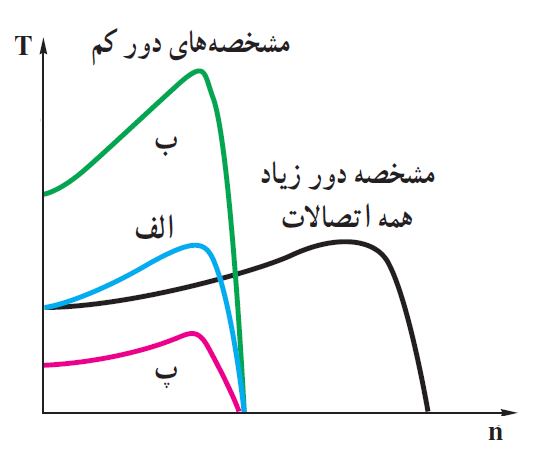
اتصال دالاندر حالت خاصی از این روش می باشد که در آن سیم پیچی هر فاز به دو قسمت تقسیم شده است. در این روش با تغییر اتصال سری به اتصال موازی تعداد قطب ها نصف و سرعت دو برابر می شود. بدین ترتیب فقط با استفاده از یک سیم پیچی دو سرعت مختلف ایجاد می توان کرد.
سه روش اتصال برای روش دالاندر وجود دارد که بصورت زیر می باشند:
مشخصه گشتاور سرعت اتصالات مختلف دالاندر بصورت زیر می باشد:
کنترل سرعت با تغییر ولتاژ:
با توجه به رابطه زیر گشتاور موتور با مجذور ولتاژ تغذیه رابطه دارد:

تغییرات ولتاژ شکل منحنی گشتاور سرعت را بصورت زیر تغییر می دهد:
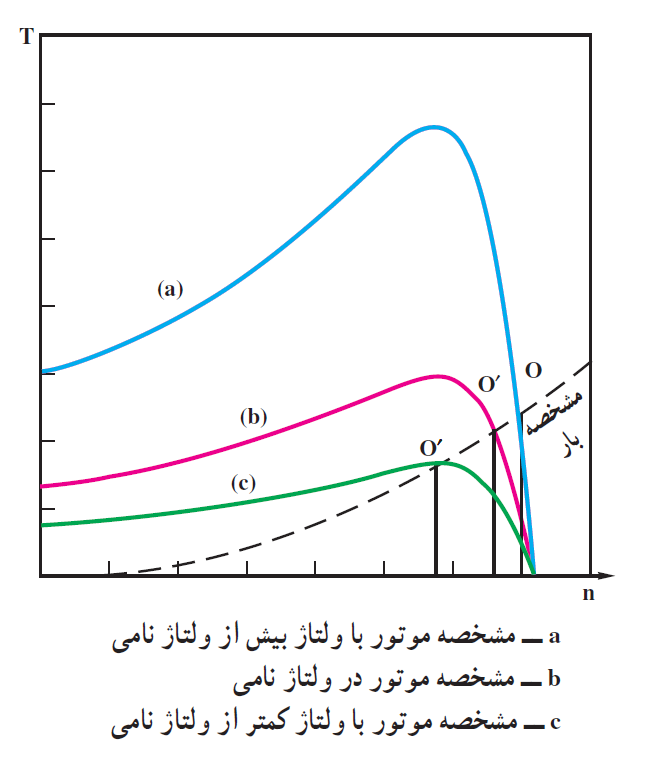
بنابراین می توان با تغییر ولتاژ سرعت را کنترل کرد. فقط باید توجه داشت که بدلیل مسایل عایقی نمی توان ولتاژ را از مقدار نامی خود بیشتر کرد و همچنین کاهش زیاد ولتاژ باعث تغییر شار شده که اثرات نامطلوبی بر روی موتور دارد.
کنترل سرعت با تغییر فرکانس منبع:
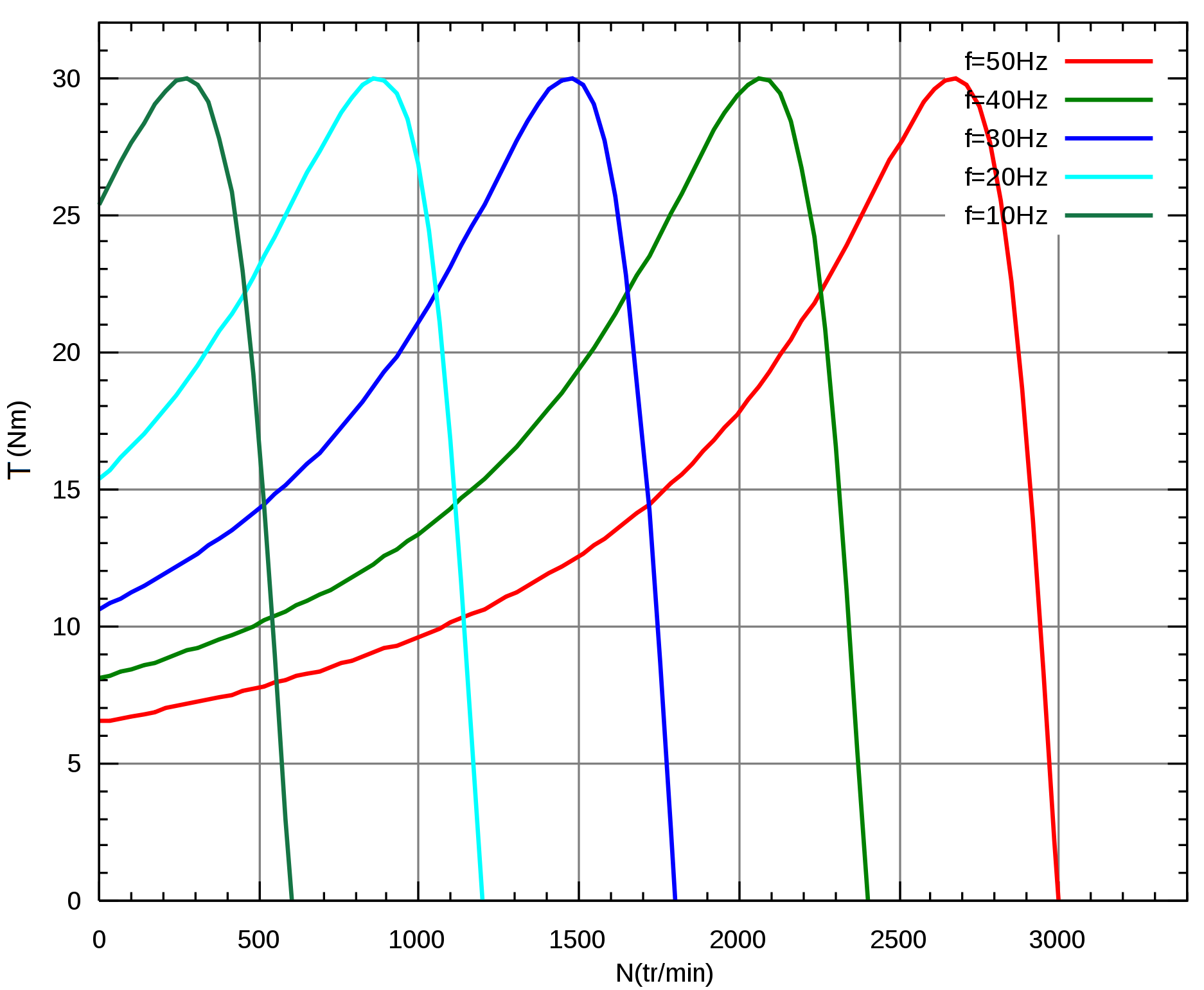
يکی از راههای تغيير ns تغيير فرکانس منبع تغذيه است. و لذا به يک تغيير دهنده فرکانس (اینورتر) در سر راه موتور نياز است. شکل زیر تغییرات منحنی گشتاور سرعت بر حسب تغییرات فرکانس را نشان می دهد:
کنترل سرعت موتورهای القایی با تغيير فرکانس مشکلاتی را برای موتور بوجود می آورد که عمده ترين آن گرم شدن هسته استاتور به علت افزايش فرکانس از حد نامی می باشد زيرا تلفات آهنی هسته استاتور با مجذور فرکانس رابطه مستقيم دارد:
بنابراين به جای استفاده از تغيير فرکانس ، از کنترل ولتاژ فرکانس (V/f) استفاده می شود.
کنترل ولتاژ فرکانس (V/f) :
مدار معادل موتور القایی را در نظر بگیرید:
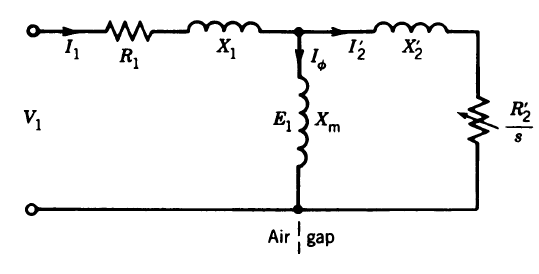
پس می توان نوشت:
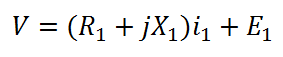
مقدار ولتاژ القایی E1 برابر است با:
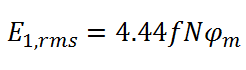
که N تعداد حلقههای سری در هر فاز و Φm شار هر قطب در شکاف هوايی می باشد. اگر از افت ولتاژ مقاومت استاتور صرف نظر کنیم داریم:
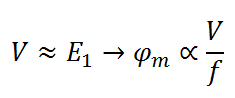
طبق رابطه بالا برای جلوگیری از به اشباع رفتن موتور بايد ولتاژ پايانه موتور متناسب با فرکانس تغيير نمايد. به اين نحوه کنترل V/f ثابت می گويند.
در اينجا بايد به اين نکته اشاره کرد که در فرکانس های پايين (حدود20 درصد فرکانس نامی) افت ولتاژ در دو سر R1 و X1 در مقابل V قابل صرف نظر نمی باشد و لذا ديگر نمی توان شار را ثابت در نظر گرفت لذا برای کنترل باید تغییرات ولتاژ بر حسب فرکانس بصورت زیر باشد:
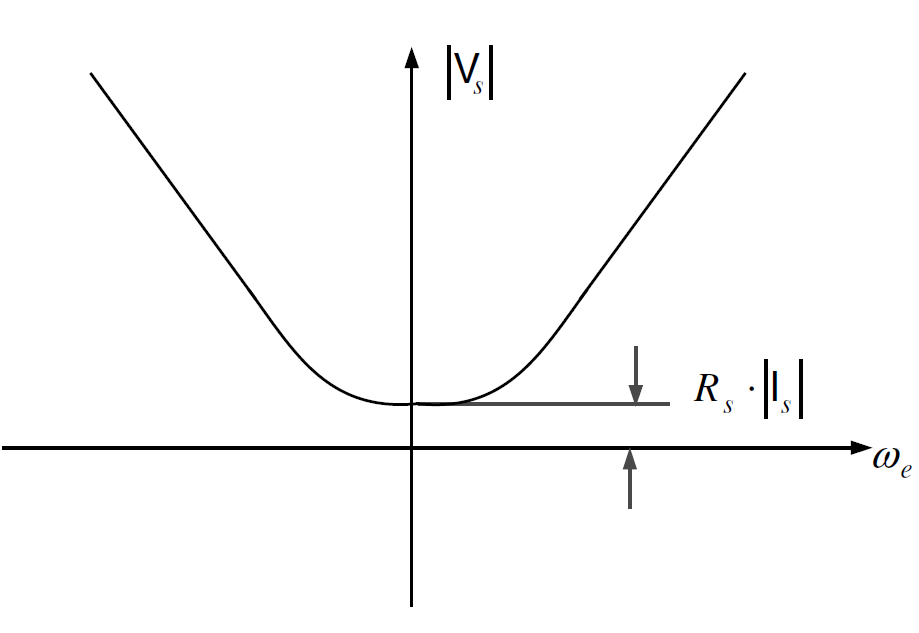
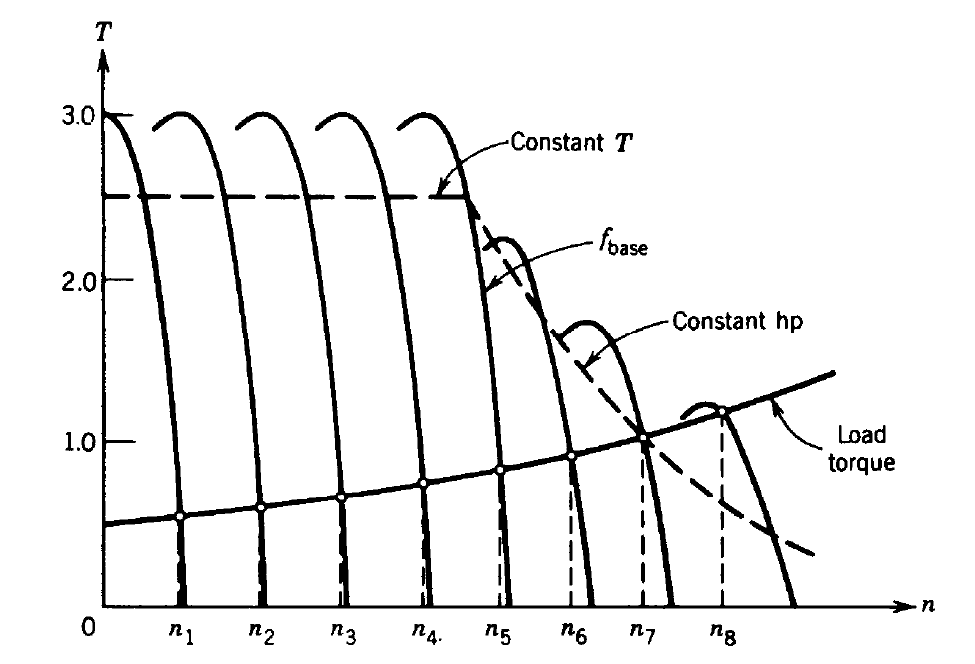
بايد توجه داشت که در فرکانس مبنا (fbase) ولتاژ پايانه موتور حداکثر مقداريست که توسط اينورتر حاصل می شود. در فرکانسهای زير (fbase) شار شکاف هوايی (Φm) با تغيير V/f ثابت نگه داشته می شود و لذا در ناحيه زير فرکانس (fbase) گشتاور ماکزيمم ثابت باقی خواهد ماند اما در ناحيه فرکانس های بيش از (fbase) ديگر V را نمی توان متناسب با فرکانس افزايش داد و در اين حالت شار در شکاف هوايی (Φm) کاهش يافته و بنابراين گشتاور ماکزيمم نيز کاهش می يابد عملکرد در اين ناحيه همانند سيستم کنترل تضعيف ميدان در موتورهای DC است.
در شکل زير منحنی مشخصه گشتاور سرعت بر اساس V/f ثابت نشان داده شده است:
این روش به دو صورت حلقه باز و حلقه بسته پیاده سازی می شود.
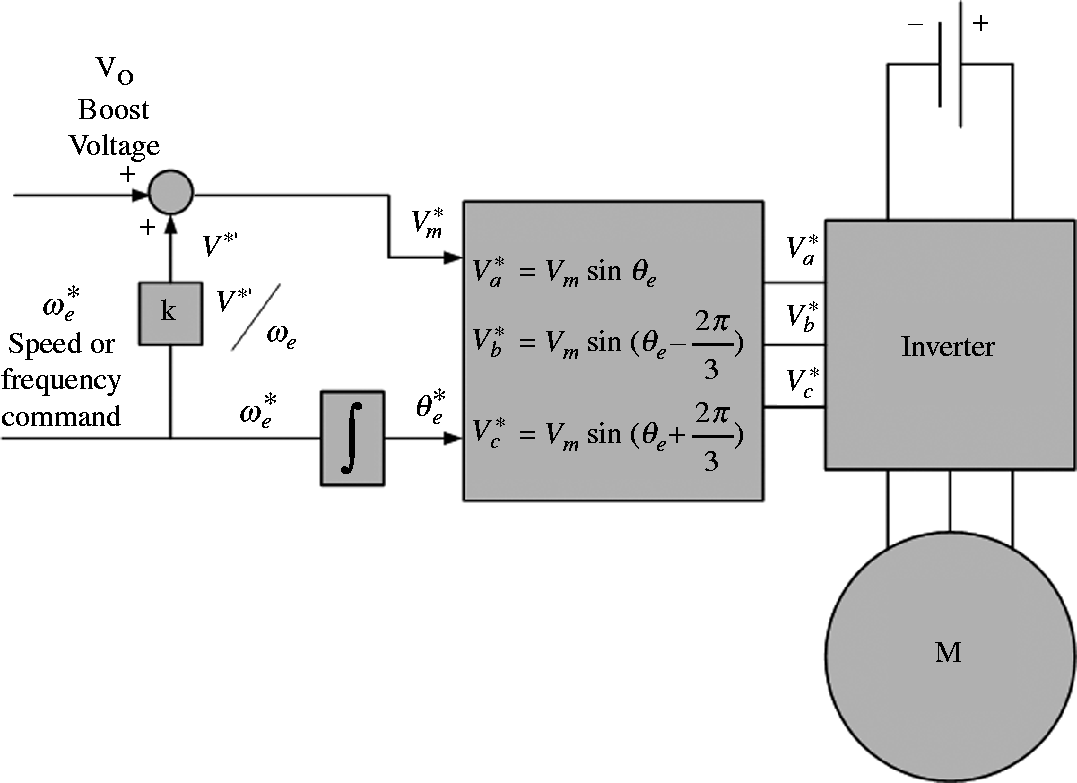
بلوک دیاگرام کنترلی حلقه باز بصورت زیر می باشد:
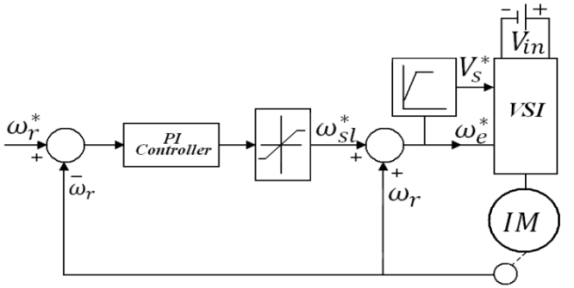
بلوک دیاگرام کنترلی حلقه بسته بصورت زیر می باشد:
برای دانلود شبیه سازی کنترل V/f حلقه باز با Matlab بر روی عکس زیر کلیک کنید.
برای دانلود شبیه سازی کنترل V/f حلقه بسته با Matlab بر روی عکس زیر کلیک کنید.




69 Comments
mohsen
درباره11 سال agoبا سلام چرا در کنترل موتورهایی القایی از ماشین آسنکرون باید استفاده کرد و برای شبیه سازی بلوک های حلقه باز و حلقه بسته از چه منبعی استفاده کرده اید - در قسمت simpower متلب چندین بلوک برای کنترل موتور القایی وجود دارد از این بلوکها در کجا استفاده می کنند ؟
پاسخAdmin
درباره11 سال agoمنظورتان را نمی فهمم
خوب موتور القایی همان ماشین آسنکرون است.برای شبیه سازی هم کتاب Power Electronics and Motor Drives آقای Bose مرجع مناسبی است.
در قسمت simpower برای موتور القایی دو بلوک آماده برای کنترل برداری FOC و DTC وجود دارد
پاسخbahram
درباره11 سال agoسلام نقش بلوک powergui در شبیه سازی چه می باشد و پارامترهای داخل آن چه می باشد و برای شبیه سازی از کدام فصل کتاب آقای Bose استفاده کرده اید ؟ مقدار پارامترها هم در داخل کتاب می باشد ؟ با تشکر
پاسخAdmin
درباره11 سال agoاگر المانی از کتابخانه simpower وارد قسمت سیمولینک کردید حتماً بلوک powergui را باید در فایل شبیه سازی قرار دهید وگرنه با پیام خطا روبرو می شوید.
این بلوک یک رابط میان قسمت قدرت با محیط سیمولیمنک می باشد و دارای قسمت های مختلف و کاربردی نیز هست برای مثال اگر می خواهید مقادیر هارمونیک شکل موج ولتاژ یا جریان را ببینید می توانید از قسمت FFT Analysis استفاده کنید.
برای شبیه سازی از فصل هفتم کتاب استفاده کردم.مقادیر پارامترها در داخل کتاب نمی باشد.می توانید فایل بالا را دانلود کرده و مقادیر انتخابی را مشاهده کنید.
پاسخhamid
درباره11 سال agoبا سلام مرجع فارسی برای طراحی کنترل کننده های موتور القایی وجود ندارد ؟ نمیتوانستید به جای موتور آسنکرون از شبیه سازی موتور القایی شده در پست های قبلی استفاده کنید ؟ روابط بلوکهای مدار باز و بسته چگونه بدست می آیند ؟ مقدار پارامترهای موجود در این شبیه سازی ها (مدار باز و بسته ) را از چه طریقی بدست می آیند ؟
پاسخAdmin
درباره11 سال agoمرجع فارسی درباره طراحی کنترل کننده ها فکر نکنم وجود داشته باشد. یک مرجع خوب زبان انگلیسی کتاب آقای Sul می باشد.
می توانید به جای موتور آسنکرون از شبیه سازی موتور القایی شده در پست های قبلی استفاده کنید با این تفاوت که خروجی بلوک های fcn را به مدل وصل کنید.
برای فهمیدن روابط هم یک بار دیگر روش V/f را مطالعه کنید.
پاسخhamid
درباره11 سال agoبا سلام مقدار پارامترهای بلوکهای TL و speed ref دلخواه می باشند یا دارای رنج مشخصی می باشند ؟ در روابط از we استفاده شده ولی در طراحی از wb استفاده شده است چه رابطه ای بین we و wr و wbوجود دارد؟ (در بلوک speed ref مقدار های خروجی در wb ضرب شده است ) و نقش المانهای volts/hertz و controlled voltage در مدار چه می باشید یا نحوه کار این المانها چه می باشد ؟ روش V/f را مطالعه کرده ام ولی روابطی در این روش ندیده ام به جز یک دیاگرام - روابط به چه طریقی بدست می آیند ؟ با تشکر
پاسخAdmin
درباره11 سال agoمقدار پارامترهای بلوکهای TL و speed ref دلخواه ولی باید کمتر از مقادیر نامی موتور باشند.
wb سرعت مبنای ماشین می باشد و we سرعت میدان دوار استاتور می باشد که در این مثال با هم مساوی هستند.wr سرعت شفت موتور است.
بلوک V/f در اصل یک جدول نظاره یا look up table است بدین معنی که به ازای ورودی از روی منحنی V/f مقدار خروجی را بدست می آورد.شکل منحنی Vs بر حسب we را در بالا نگاه کنید.
اما در مورد روابط نیز باید بگویم که این روش روش خیلی ساده ای است مقدار سرعت به فرکانس ورودی منبع وابسته است اما با تغییر فرکانس شار نیز تغییر می کند که برای رفع این مشکل باید مقدار ولتاژ منبع نیز متناسب با فرکانس ورودی تغییر کند.یعنی باید ولتاژی سینوسی که هم دامنه و هم فرکانس آن بر حسب این روش محاسبه می شوند به سر موتور اعمال کرد.
پاسخhamid
درباره11 سال agoسلام ممنون و نقش المانهای volts/hertz و controlled voltage در مدار چه می باشید یا نحوه کار این المانها چه می باشد ؟ کتاب یا مرجعی نیست که نحوه کار یک المان یا بلوک را در متلب توضیح داده باشد قسمت help متلب هست ولی یک سایت یا مرجع فارسی نیست ممنون
پاسخAdmin
درباره11 سال agoبا توجه به درخواست دیگر دوستان سعی می کنم که هر دو-سه هفته یک بار در باره المان های متلب و نحوه کار با آنها توضیح دهم.
پاسخbahram
درباره11 سال agoبا سلام طراحی کنترل کننده ها با توجه به دیاگرام های آنها بدست می آیند این دیاگرام ها ( حلقه باز و بسته ) از چه مرجعی بدست می آیند و مولف آن چه کسی می باشد ؟ (مرجع این پست) مقدار بلوک PID و Limmiter و مقدار گین که (P/2)/wb) می باشد از چه طریقی بدست می آیند ؟ ( مقدار بلوک PID و Limmiter و گین همیشه ثابت است ؟) با سپاس
پاسخAdmin
درباره11 سال agoنحوه تنظیم پارامترهای کنترل کننده PID خود مبحثی جدا می باشد و روش های مختلفی نیز برای تنظیم آن ارائه شده است.
راجع به بلوک Limitter هم باید بگویم که wslip یک موتور ثابت می باشد و حدود 20 درصد مقدار سرعت آن می باشد
رابطه آن را در قسمت موتور القایی اشاره کرده ام
پاسخmahdi
درباره11 سال agoبا سلام سرعت و گشتاور در موتور القایی چه رابطه ای با هم دارند ؟ مرجع این دیاگرامهای حلقه باز و بسته چه می باشد ( می خواهم بدانم نمادهای نشان داده چه می باشند مثالا we چه می باشد یا wsi یا we ستاره دار ) میخواهم جز به جز این پارامترها را بشناسم ؟ سپاس
پاسخAdmin
درباره11 سال agoرابطه گشتاور با سرعت را در بالا اشاره کرده ام (رابطه لغزش با گشتاور). مرجع کتاب آقای Bose می باشد که البته انگلیسی می باشد
we ستاره دار همان سرعتی است که شما می خواهید موتور با آن بچرخدwsl خروجی کنترل کننده می باشد و سرعت لغزش است we نیز سرعت الکتریکی منبع یا همان استاتور می باشد
پاسخmohsen
درباره11 سال agoبا سلام در موتور های القایی چه رابطه ای بین سرعت نامی و گشتاور می باشد ؟ منبع دیاگراههای حلقه باز و حلقه بسته چه می باشد ؟ (می خواهم پارامترهای we و wsi یا we ستاره دار را دقیقتر بشناسم )
پاسخAdmin
درباره11 سال agoجوابتان را در کامنت های بالا داده ام
پاسخmohsen
درباره11 سال agoسلام کدام فصل کتاب آقای bose ?
پاسخAdmin
درباره11 سال agoفصل هفتم کنترل موتور القایی
سعی کنید فقط چند ثانیه به فهرست کتاب نگاهی بیندازید تا جوابتان را بگیرید
پاسخمرتضی
درباره10 سال agoسلام کنترل اسکالر موتور القایی تکفاز متصل به سیستم فوتوولتایی از طریق اینورتر منبع امپدانس این موضوع پروژه ی من است میتونید کمکم بکنید؟
پاسخali
درباره10 سال agoسلام .ببخشید مقدار تقریبی لاندا ها در موتور القایی مشخص هست ؟ اگه بخوام یه مقدار تقریبی برای لاندا کیو ار و لاندا دی ار بگیرم چند میتونه باشه ؟باتشکر
پاسخAdmin
درباره10 سال agoمقدار لاندا روتور بستگی به پارامترهای آن دارد ولی چیزی حدود 1.1 است.پیشنهاد می کنم که کتاب آقای Andrzej M.Trzynadlowskiرا بخوانید.
پاسخمجتبی
درباره10 سال agoسلام یه موتور ac و 20وات و چه جوری میتونم سرعتشو خیلی کم یا به اندازه ی مورد نظر خودم کنم؟
پاسخAdmin
درباره10 سال agoخوب بستگی داره تک فاز باشه یا سه فاز.
باید یه درایو براش بسازی که اگر تجربه چنین کاری را نداری بهتر است که بی خیال شوید.
پاسخazadeh
درباره10 سال agoبا سلام لطفا لینک مقاله ای که این شبیه سازی موتور از روی آن انجام شده را بگذارید. متشکرم.
پاسخAdmin
درباره10 سال agoدر نظرات بالا جوابتان موجود است.
پاسخazadeh
درباره10 سال agoدر فصل هفتم کتاب آقای bose که شما به عنوان مرجع این شبیه سازی ذکر کردید، معادلات حالت موتور القایی یا روابطی که براساس آنها این شبیه سازی صورت گرفته، و نیز پارامترها ذکر نشده است. در صورت امکان این معادلات را ذکر کنید.
پاسخAdmin
درباره10 سال agoاگر شما یک مرجعی که مقادیر پارامترها را داده می خواهید بهتر است به کتاب Dynamic simulation of Electric Machinery using MATLAB از آقای ong مراجعه کنید.
پاسخomid
درباره10 سال agoبا سلام فایل کنترل حلقه بسته برای من خطا میدهد در متلب 2013 به TL و Mux گیر میدهد امکان دارد کمک کنید با تشکر
پاسخAdmin
درباره10 سال agoشبیه سازی با نسخه 2012b انجام شده است و نباید مشکلی با 2013 داشته باشد.
پاسخمحمدرضا
درباره10 سال agoسلام . ببخشید . می خواستم منو برای شبیه سازی (رسم نمودار گشتاور- سرعت)موتور القایی سه فاز با در نظر گرفتن اثر پوستی راهنمایی کنید. در واقع سوال اصلی من این است که نقطه ی گشتاور pull up چگونه توجیه می شود؟ متشکرم.
پاسخAdmin
درباره10 سال agoکافی است که skin effect induction motor را در اینترنت جستجو کنید تا مقالات مرتبط با آن را ببینید.
پاسخسعيد
درباره10 سال agoباسلام سيمولينک موتور القايي به روش pidروکجاميتونم پيداکنم؟البته تايجاهاييشوبلدم ولي معادله مشخصه ک بايد براي پياده سازي بلوک هااستفازه کنم ازکجا بيارم اصلا چي هست مگه معادله سرعت نيس لطفااگه ميشه زودترجواب بديد ممنون
پاسخسید مجتبی
درباره10 سال agoبا سلام به مهندس.بعد از اینورتر بر روی الکتروموتور بهتره ستاره ببندیم یا مثلث؟
پاسخAdmin
درباره10 سال agoبستگی به ولتاژروی پلاک موتور و خروجی اینورتر دارد. در حالت مثلث ولتاژ بیشتری روی سیم پیچی یک فاز می افتد و ممکن است به موتور آسیب برساند.
پاسخهاشمی
درباره9 سال agoسلام ورودی اینورتر باید حتما DC باشد یا AC هم می تواند باشد . در تابلو های صنعتی برق ورودی مستقیم وارد اینورتر شده است .
پاسخAdmin
درباره9 سال agoدر اینورترهای صنعتی معمولا قسمت ورودی اینورتر یک پل یکسوساز است که ولتاژ را دی سی می کند.
ولی در کتب دانشگاهی معمولاْ اصطلاح اینورتر به قسمت پل سه فاز که سوئیچنگ را انجام می دهد اینورتر گفته می شود و فرض شده که ورودی اینورتر یک منبع دی سی است.
پاسخmahmud
درباره9 سال agoسلام ببخشید اعداد مربوط به بلوکlookup table را چگونه انتخاب کرده ای(رابطه بین ولتاژ و فرکانس)
پاسخAdmin
درباره9 سال agoموتور باید در نقطه کار نامی خود ولتاژ نامی و سرعت نامی داشته باشد.
پاسخmahmud
درباره9 سال agoعالی بود ممنون
پاسخفرشاد
درباره9 سال agoبا سلام مراجع شکل های مربوط به این صفحه چه می باشد؟ بنده برای رفرنس دهی در گزارش پروژه ام میخواهم. با تشکر
پاسخAdmin
درباره9 سال agoکتاب P.Sen مرجع این پست می باشد.
پاسخمجنون
درباره9 سال agoبا سلام . روش کنترل برداری FOC رو به صورت تشریحی میخواستم ؟
پاسخAdmin
درباره9 سال agoپست زیر را مطالعه کنید:
https://motodrive.ir/%D8%B1%D9%88%D8%B4-%D9%87%D8%A7%DB%8C-%DA%A9%D9%86%D8%AA%D8%B1%D9%84-%D9%85%D9%88%D8%AA%D9%88%D8%B1-%D8%A7%D9%84%D9%82%D8%A7%DB%8C%DB%8C-%D8%A8%D8%AE%D8%B4-%D8%AF%D9%88%D9%85
پاسخمجنون
درباره9 سال agoبا سلام وخسته نباشید از روشهای کنترل برداری که در جدول بالا هست ، قسمت مربوط به field-oriented control رو توضیح ندادین لطف کنین اگه مطالبی هست در سایت قرار بدین. باتشکر
پاسخAdmin
درباره9 سال agoمی توانید به پست زیر مراجعه کنید:
https://motodrive.ir/%D8%B1%D9%88%D8%B4-%D9%87%D8%A7%DB%8C-%DA%A9%D9%86%D8%AA%D8%B1%D9%84-%D9%85%D9%88%D8%AA%D9%88%D8%B1-%D8%A7%D9%84%D9%82%D8%A7%DB%8C%DB%8C-%D8%A8%D8%AE%D8%B4-%D8%AF%D9%88%D9%85
پاسخعلی
درباره9 سال agoسلام خسته نباشید ببخشید میخواستم بدونممقادیر اولیه رو از کجا آوردید چون من جایی پیدا نکردم؟و اینکه متوجه نشدم که قسمت limmiter به چه منظوری به کار میره؟مگر لغزش ممکنه از smax بالاتر بره؟ سوال آخر اینکه این اعداد رو برای lookup table از کجا آوردید؟ [-70 -40 0 40 70].[340 200 0 200 340]
پاسخAdmin
درباره9 سال agoاین مقادیر مربوط به منحنی v/f موتور القایی است که بصورت نامی داده شده است. در مورد لغزش هم بله ممکن است در سیستم کنترل لغزش بیشتر از لغزش ماکزیمم شود.
پاسخعلی
درباره9 سال agoببخشید باز هم فقط اگه امکانش هست میشه بگید مقادیر اولیه رو مثل مقاومت ها و گشتاور بار و... رو از چه منبعی استفاده کردید؟چون من تمام منابعی که گفتید رو نگاه کردم نتونستم پیدا کنم ممنون
پاسخAdmin
درباره9 سال agoدر منابعی که معرفی شده اند فقط الگوریتم کنترل توضیح داده شده است و پارامترهای موتور به صورت دلخواه است.
پاسخali
درباره9 سال agoسلام ببخشید limiter وظیفه اش چیه؟ چرا لغزش رو بعد از عبور از PI داده شده به لیمیتر؟ مگه خروجی بعد از PI چیه که باید به لیمیتر هم داده بشه؟و چرا مقدارش 0.7 گذاشته شده؟
پاسخAdmin
درباره9 سال agoوظیفه limiter محدود کردن سیگنال کنترل است. برای مثال فرض کنید که سیگنال کنترل یک سیگنال جریان باشد که باید به موتور اعمال شود. اگر این جریان از جریان نامی موتور بیشتر باشد می تواند به سیم پیچی های آن آسیب بزند. برای همین باید سیگنال کنترل محدود شود.
پاسخمصطفی
درباره8 سال agoسلام مهندس باتشکر فراوان و فوق العاده بابت مطالبتون مهندس ی ارور داده واسم داخل شبیه سازی برای پارامتر V2 موتور چکارش کنم ؟!
پاسخAdmin
درباره8 سال agoلطفاً عکسی از پیام خطا به ایمیل زیر ارسال کنید تا بررسی شود:
admin@motodrive.ir
پاسخm.s
درباره8 سال agoسلام مهندس خسته نباشید. داخل شبیه سازی به روش حلقه بسته یک ارور میده در مورد بلوک look-up table 1 که در بلوک TL قرار داره! در این باره باید چیکار کنم ؟؟؟ به کمکتون نیازمندم
پاسخAdmin
درباره8 سال agoبلوک مربوط به TL را حذف کنید و بجای آن از یک بلوک Step استفاده نمایید.
پاسخm.s
درباره8 سال agoنمیشه با همین بلوک TL ارور رو برطرف کرد ؟؟
پاسخAdmin
درباره8 سال agoاین شبیه سازی با نسخه ۲۰۱۲ انجام شده است ولی اگر نسخه متلب شما فرق می کند به بلوک TL اشکال وارد می کند. برای رفع این مشکل از یک بلوک Step استفاده کنید و مقداری گشتاور و زمان اعمال آن را تنظیم کنید.
پاسخعلی
درباره7 سال agoبا سلام باجایگزینی step به جای بلوک tl مقدار گشتاور وزمان چقد بایدباشد .؟
پاسخAdmin
درباره7 سال agoبستگی دارد که در چه زمانی نیاز دارید گشتاور بار به موتور اعمال شود. برای مثال اگر می خواهید در زمان 1 ثانیه گشتاور 5 نیوتن متر به موتور اعمال کنید کافی است که مقدار زمان در بلوک step را برابر ۱ و مقدار پله را برابر 5 قرار دهید.
پاسخalireza
درباره8 سال agoسلام، خسته نباشید مهندس،فقط می خواستم بگم اگه امکانش هست شبیه سازی حلقه بسته روش کنترلی V/F را برای ران شدن در متلب 2016 اصلاح کنید. چون علاوه بر گرفتن خطای مربوط به بلوک گشتاور بار، خطایی هم در مورد بلوکهای mux استفاده شده می گیره که من نتونستم درستش کنم. یه سوال هم داشتم، من شبیه سازی شما را می خوام بدون حالت پریونیت کردن سرعت انجام بدم. می خواستم بدونم: غیر از تبدیل مقدار wb به مقدار 1 در بلوکهای که شامل آن هستند و تغییر مقدار بلوک سرعت پایه به سرعت نامی، حدود بلوک محدود کننده را چطور باید تغییر بدم؟ (آیا تغییر دیگری در شبیه سازی لازم هست) اگر امکانش هست پاسخ را به ایمیل زیر بفرستید،اگر نه همین جا پاسخ بدید، با تشکر. ar.sahafi66@yahoo.com
پاسخAdmin
درباره8 سال agoبرای رفع خطای مربوط به mux باید روی گزینه آبی رنگ کلیک کرده و سپس در صفحه ای که باز می شود رو بروی خطای مربوطه گزینه را به error تغییر دهید.
حدود بلوک محدود کننده را هم باید در wb ضرب کنید.
پاسخAli
درباره7 سال agoسلام مطالبتون عالیه . وهمینطور درخواستی داشتم بنده پروژه انواع روش های کنترل سرعت موتور القایی دارم اگر امکانش هست میخواستم مطالبی برای گزارش پروژه دراختیارم بذارید ومن را در گزارش نویسی راهنمایی کنید با تشکر از لطف شما.
پاسخAdmin
درباره7 سال agoبرای نوشتن گزارش می توانید به سایت هایی که فایل متن پروژه می فروشند مراجعه کنید.
پاسخmaryam
درباره7 سال agoسلام متاسفانه برنامه اجرا نمیشه خطا میده .میشه راهنمایی کنید؟
پاسخAdmin
درباره7 سال agoشبیه سازی با نسخه ۲۰۱۲ انجام شده و مشکلی ندارد. اگر از نسخه های بالاتر استفاده می کنید باید بلوک TL رو جایگزین کنید.
پاسخfarshad
درباره6 سال agoسلام خسته نباشید یه سوال داشتم اینکه مگه معادلات موتور القایی غیر خطی نیستند و شما از یک کنترل کننده خطی استفاده کردین یدون اینکه معادلات رو خطی کنید این اشکالی به وجود نمیاره ؟ سوال بعدیم اینه که اگه بخوایم بااستفاده از روش جایابی قطب یا همون فیدبک حالت سرعت موتور رو کنترل کنیم باز هم میشه بدون خطی کردن کنترل کندده رو طراحی کرد یا نه؟ اگه مرجع خوبی هم تو این زمینه میشناسین اگه میشه بهم معرفی کنید خیلی ممنون
پاسخAdmin
درباره6 سال agoدرست است که کنترل کننده خطی برای سیستم های خطی مناسب است ولی برای برخی سیستم های غیرخطی نیز جوابگو هست و در این سیستم نیز به خوبی کار می کند. البته کنترل کننده های غیرخطی دیگری نیز برای همین موتور استفاده شده است که از نظر پاسخ دینامیکی خیلی سریع تر جوابگو هستند و عملکرد بهتری دارند.
روش جایابی قطب برای سیستم های خطی استفاده می شود که ماتریس A معادله حالت آنها خطی است ولی در این سیستم این ماتریس متغیر با زمان است و ثابت نیست.
می توانید معادلات حالت را حول نقطه کار خطی کنید و برای آن نقطه کار با استفاده از روش جایابی قطب کنترل کننده را طراحی کنید. ممکن است که برای سیستم غیرخطی جوابگو نباشد و جایی ندیدم که از این نوع روش برای این موتور استفاده شده باشد.
پاسخreza
درباره6 سال agoسلام ببخشید میخواستم ببینم اگر دو عدد موتور القایی را با یک شفت کوپل کنیم و هر موتور درایو جداگانه برای کنترل داشته باشد. اگریکی از موتورها را راه اندازی کنیم موتور دیگر به حالت ژراتوری خواهد رفت ویا اینکه در سرعت های مختلف امکان به اشباع رفتن موتور دیگر هست یا خیر؟
پاسخAdmin
درباره6 سال agoاگر موتور القایی دوم روتور سیم پیچی باشد و روتور به یک منبع متصل باشد موتور القایی ژنراتور می شود در غیر این صورت ولتاژی تولید نمی کند.
پاسخ