روش های کنترل موتور القایی (بخش دوم)
در بخش قبلی روش های کنترل اسکالر شرح داده شد. همان طور که گفته شد پیاده سازی این روش بسیار راحت و ارزان می باشد ولی نمی توان در رنج وسیع سرعت از این روش برای کنترل موتور القایی استفاده کرد. دلیل ناکارآمد بودن این روش وابستگی گشتاور و شار به جریان های تزریقی به موتور می باشد که نمی توان این دو پارامتر را بصورت مستقل کنترل کرد و با تغییر یکی دیگری تغییر می کند.
همان طور که در شکل زیر مشخص است در موتور DC دو سیم پیچی بصورت عمود بر هم وجود دارد بنابراین تغییرات یکی روی دیگری اثری ندارد. پس می توان جریان شار (سیم پیچی میدان) را ثابت در نظر گرفت و با کنترل گشتاور (جریان سیم پیچی آرمیچر) سرعت را از صفر تا بالاتر از سرعت نامی کنترل کرد:
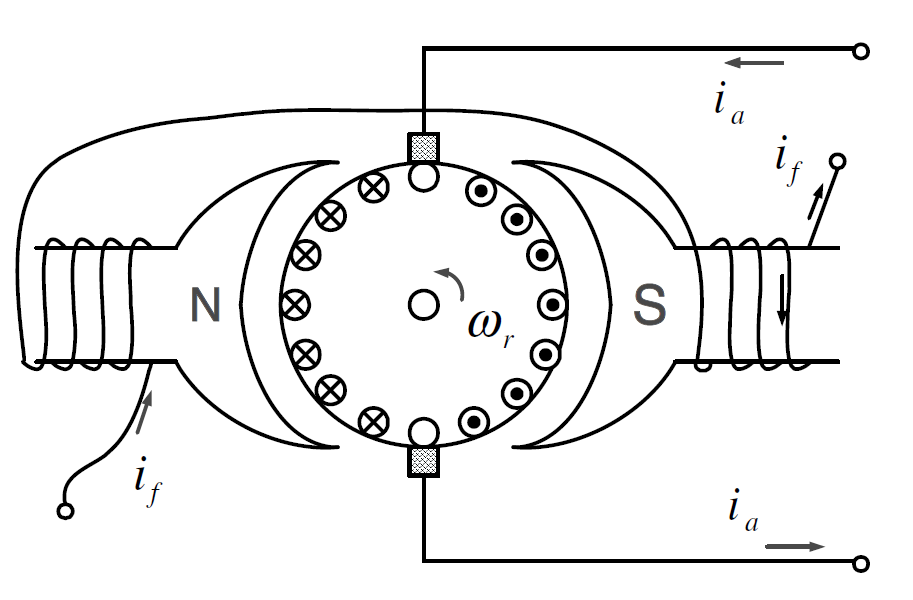
روش کنترل برداری بر این اساس شکل گرفته است که ابتدا مدل سه فاز موتور القایی را به مدل دو سیم پیچ عمود بر هم تبدیل کرده و سعی می کند که جریان این دو سیم پیچی را کنترل کند. برای مثال فرض کنید موتور القایی با سه سیم پیچی موجود می باشد:
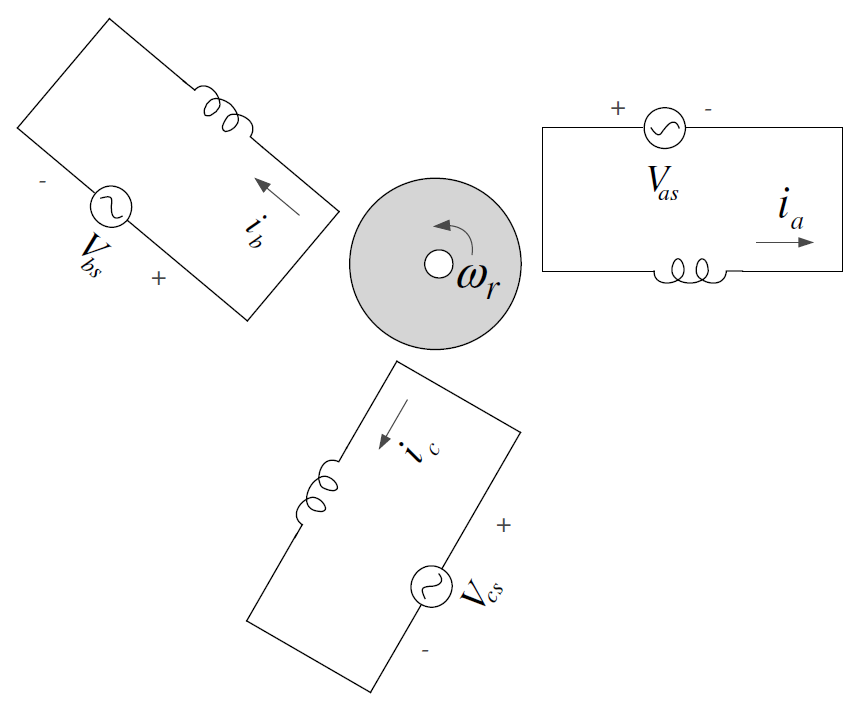
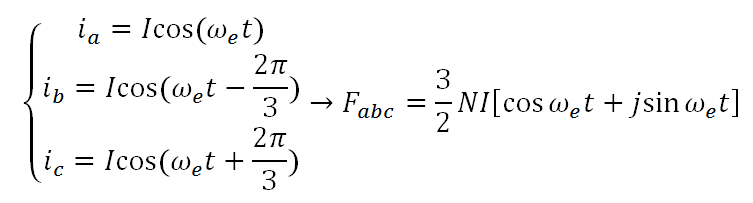
MMF گردان بصورت زیر قابل محاسبه است:

توجه کنید که اگر جریان ها را متعادل و سینوسی در نظر بگیریم پس داریم:
با توجه به رابطه بالا می توانیم مدل سه سیم پیچی را به دو سیم پیچی عمود بر هم بصورت زیر در نظر بگیریم:
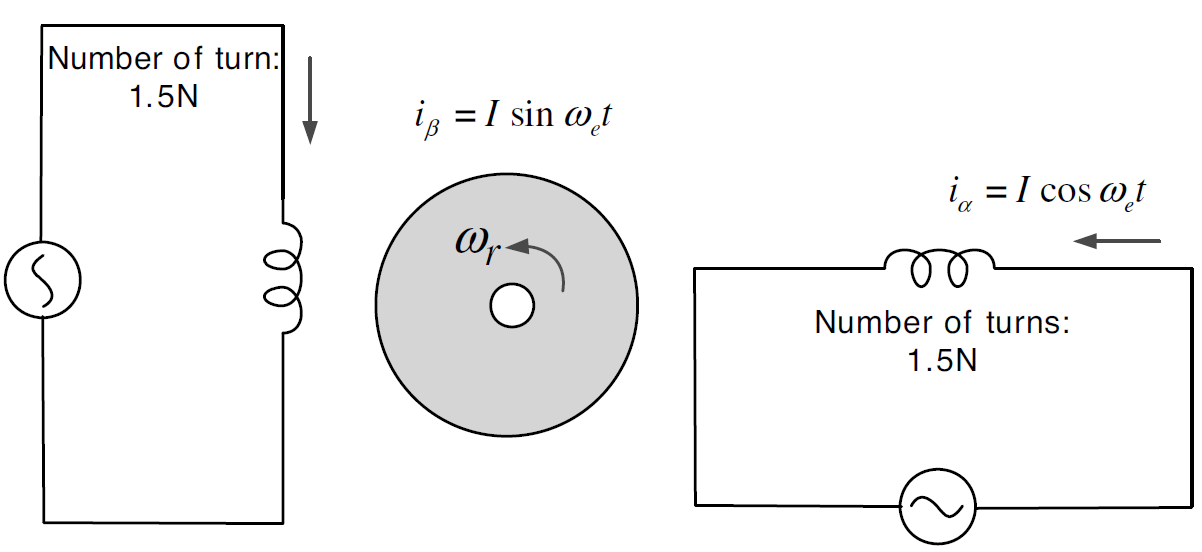
توجه کنید که مقدار جریان در این حالت DC و تعداد دور سیم پیچی 1.5 برابر شده است. همان طور که مشخص است چون دو سیم پیچی بر عمود هستند پس دیگر بر یکدیگر تاثیر نمی گذارند.
اساس کنترل برداری نیز مثل مثال بالا می باشد یعنی با تبدیل مدل سه فاز به مدل دو فاز dq دوار.
می توان با جهت دهی مناسب شار گشتاور را با جریان iqs و مقدار شار را با ids کنترل کرد.
با توجه به اینکه کدام شار برای جهت دهی انتخاب شود روش کنترل برداری به سه روش پیاده سازی می شود:
-
روش جهت دهی شار روتور (Rotor Flux Oriented)
-
روش جهت دهی شار استاتور (Stator Flux Oriented)
-
روش جهت دهی شار مغناطیس کنندگی (Magnetizing Flux Oriented)
مزیت و معایب هر یک از روش های بالا عبارت انداز:
روش جهت دهی شار روتور نسبت به پارامترهای موتور حساس و دارای مدار مجزاساز (Decouple) پیچیده می باشد ولی این روش پایدار می باشد.
روش جهت دهی شار استاتور حساسیت کمتری نسبت به پارامترهای موتور دارد و مدار مجزاساز (Decouple) آن ساده می باشد ولی این روش دارای محدودیت جریان iqs جهت پایداری می باشد.
روش جهت دهی شار مغناطیس کنندگی حساسیت نسبت به لرزش و حرارت موتور دارد و همچنین اندازه گیری شار در این روش مشکل می باشد و دارای محدودیت جریان iqs جهت پایداری می باشد.
با توجه به مطالب گفته شده چون ما نیاز به کنترل پایدار داریم بنابراین به سراغ روش جهت دهی شار روتور می رویم.
با توجه به اینکه زاویه روتور چگونه اندازه گیری می شود روش های کنترل برداری به دو روش پیاده سازی می شوند:
- روش مستقیم (Direct)
- روش غیرمستقیم (Indirect)
در روش مستقیم زاویه روتور مستقیماً بوسیله سنسور اندازه گیری می شود ولی در روش غیر مستقیم موقعیت روتور بوسیله پارامترهای دیگر تخمین زده می شود.
با توجه به اینکه از چه نوع اینورتری برای کنترل استفاده می شود روش های کنترل برداری به دو روش زیرتقسیم بندی می شوند:
- اینورتر منبع ولتاژی
- اینورتر منبع جریانی
در این رابطه فقط باید اشاره کنم که اینورترهای منبع جریانی معمولاً برای موتورهای خیلی بزرگ استفاده می شوند.
در ادامه روش جهت دهی شار روتور به دو روش مستقیم و غیر مستقیم توضیح داده می شود.
روش کنترل برداری مستقیم:
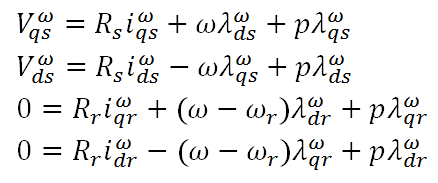
معادلات ولتاژ موتور القایی در دستگاه dq که با سرعت دلخواه می چرخد بصورت زیر می باشد:
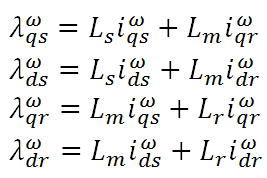
و همچنین برای شار داریم:
بنابراین رابطه گشتاور بصورت زیر محاسبه می شود:
اگر دستگاه مرجع ساکن انتخاب شود شار استاتور را با اندازه گیری ولتاژ و جریان استاتور بصورت زیر می توان محاسبه کرد:
بنابراین طبق روابط بالا شار روتور برحسب شار و جریان استاتور بصورت زیر محاسبه می شوند:
که σ بصورت زیر تعریف می شود:
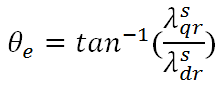
با پیدا شدن شارهای محور d و q روتور می توان زاویه شار روتور را بصورت زیر محاسبه کرد:
بر اساس این زاویه جریان های استاتور را در دستگاه سنکرون می توان بصورت زیر نوشت:

چون در این روش شار محور d را در جهت شار روتور جهت دهی می کنیم پس شار محور q برابر با صفر می شود پس از رابطه ولتاژ محور d روتور داریم:

چون جریان روتور را نمی توان اندازه گیری کرد پس باید جریان idr از رابطه بالا حذف شود پس داریم:
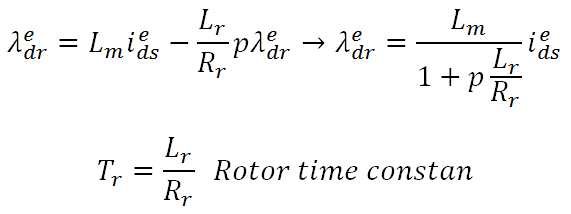
پس طبق رابطه بالا با کنترل جریان ids می توان شار را کنترل کرد. همچنین چون شار محور q صفر است، رابطه گشتاور بصورت زیر در می آید:

طبق رابطه بالا با ثابت بودن شار، گشتاور را می توان با جریان iqs مستقلاً کنترل کرد.
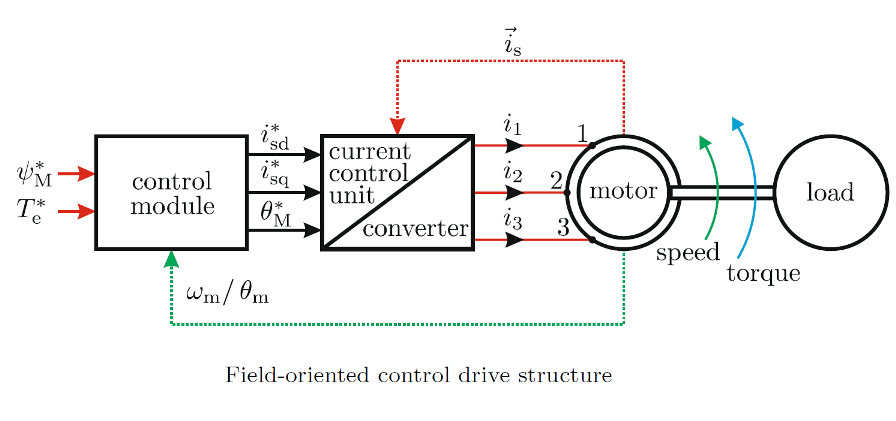
همان طور که از روابط مشخص است این روش به پارامترهای موتور وابسته است. بلوک دیاگرام کنترلی این روش بصورت زیرمی باشد:
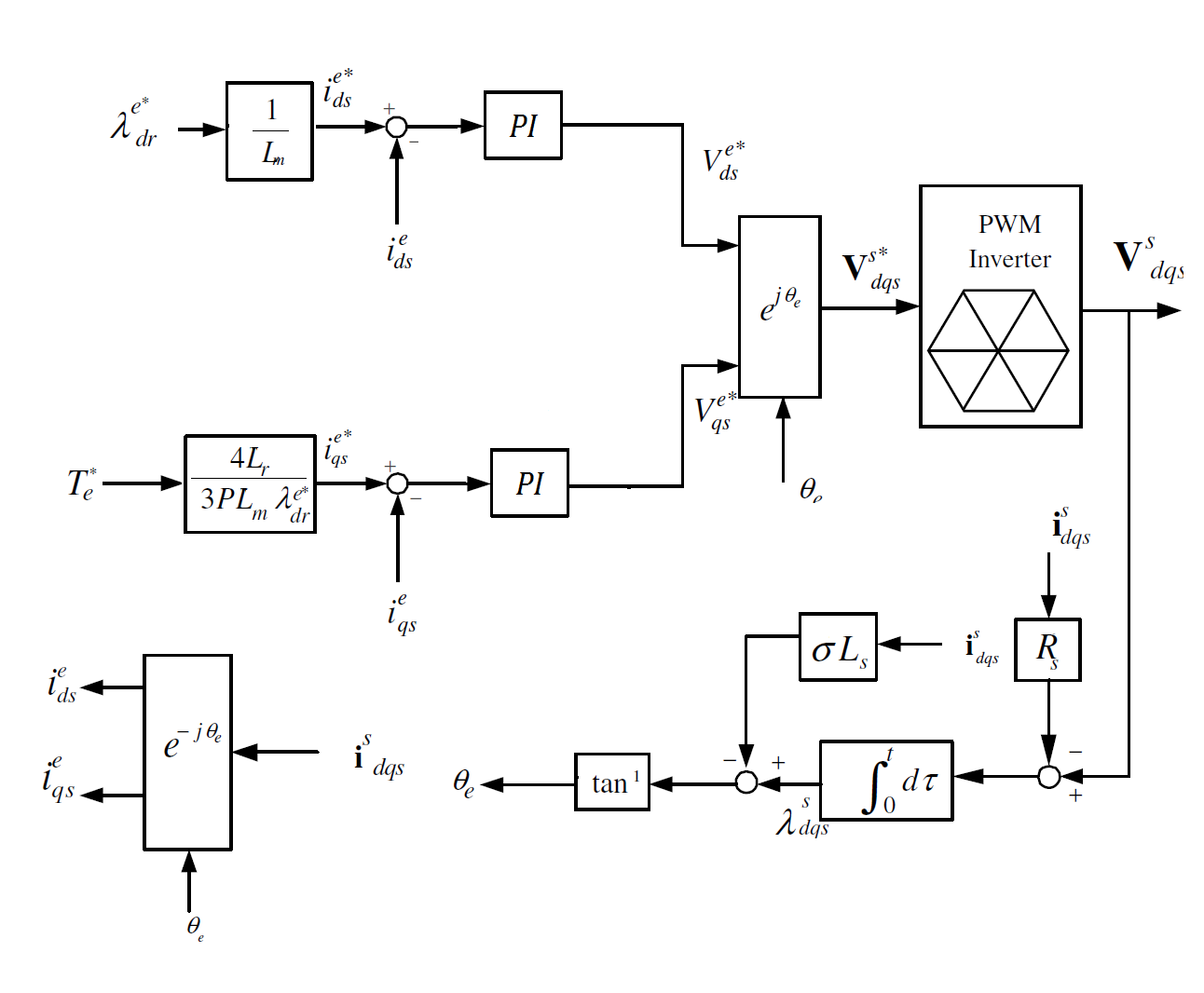
توجه کنید که برای تخمین شار روش های مختلفی وجود دارد.
روش کنترل برداری غیر مستقیم:
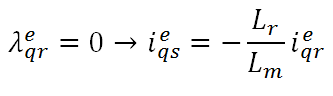
همان طور که گفته شد در روش غیر مستقیم زاویه شار بوسیله روابط بدست می آید. مانند قبل چون شار در جهت شار روتور جهت دهی می شود پس شار محور q روتور صفر می باشد. با استفاده از روابط مربوط به شار در مرجع سنکرون می توانیم بنویسیم:
همچنین با توجه به رابطه ولتاژ محور q روتور می توان نوشت:
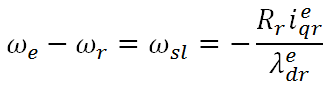
با استفاده از دو رابطه بالا سرعت لغزش بصورت زیر بدست می آید:

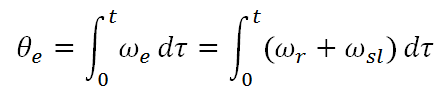
با بدست آوردن سرعت لغزش و با اندازه گیری سرعت روتور می توان زاویه شار را محاسبه کرد:
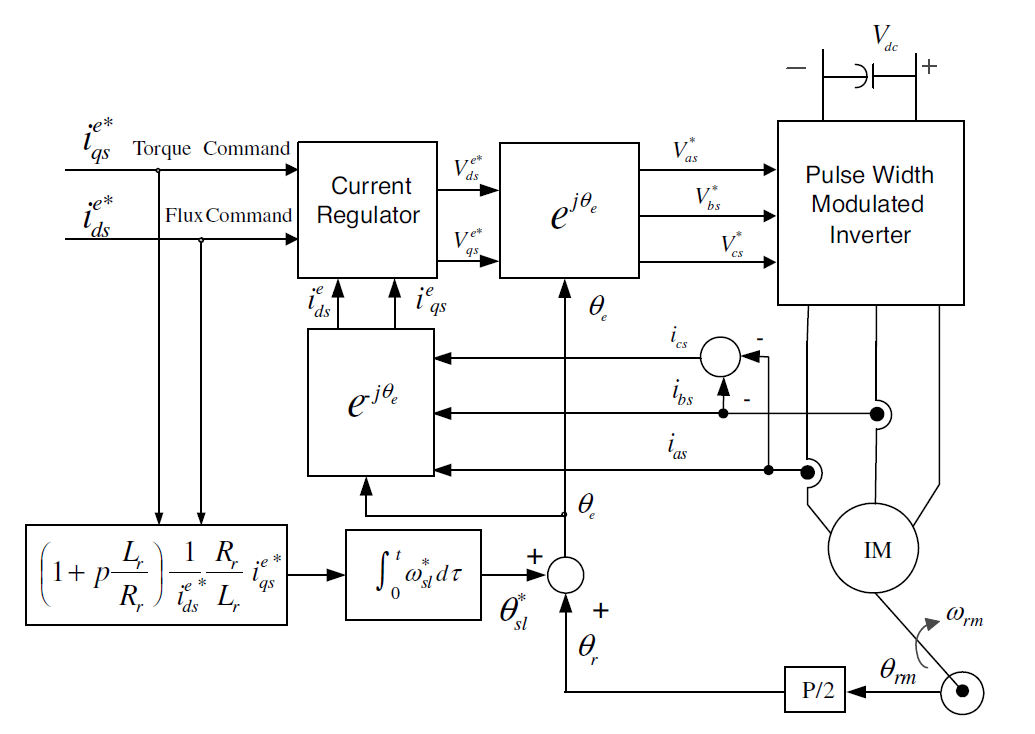
بلوک دیاگرام کنترلی این روش بصورت زیر می باشد:
نکاتی را که برای کنترل موتور در این روش باید در نظر گرفت عبارت انداز:
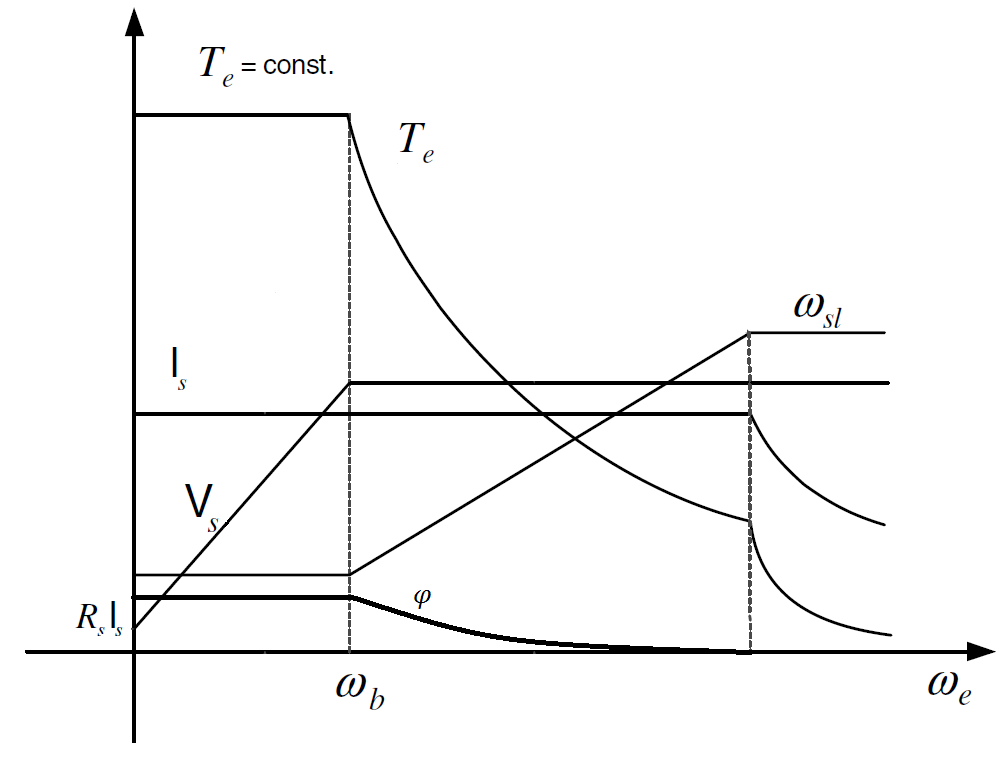
1) مانند موتور DC بسته به ناحیه عملکرد، پارامترهای موتور از قبیل شار،ولتاژ و جریان بصورت زیر تغییر می کنند:
2) توجه کنید که برای بهبود این روش ها می توان از فیدفوروارد ولتاژ و مجزاسازی پارامترها نیز استفاده کرد. در این روش ها تعداد کنترل کننده ها (5-6) افزایش می یابد.
3) نحوه تنظیم کنترل کننده های PID می تواند بر سرعت پاسخ تاثیر بسزایی داشته باشد.
برای دانلود شبیه سازی کنترل موتور القایی به روش کنترل برداری غیر مستقیم با Matlab بر روی عکس زیر کلیک کنید.
جهت سفارش شبیه سازی پروژه کنترل برداری موتور القایی با مدار مجزاساز با Matlab بر روی عکس زیر کلیک کنید.




45 Comments
alireza
درباره11 سال agoبا سلام مقدار پارامترهای مورد نیاز شامل Lm - Lr - Rr - Vd -Kp-Lsc -Rs -P-J - Ki را از کجا بدست میاریم ؟ مقادیر پیش فرضی ندارید ؟ ممنون
پاسخAdmin
درباره11 سال agoفایل شبیه سازی شده را از بالا دانلود کنید و در نرم افزار متلب باز کنید بر روی بلوک موتور القایی کلیک کنید تا مقادیر پیش فرض را مشاهده کنید
پاسخali
درباره11 سال agoسلام منبع این روش کنترل نیز چه منبعی می باشد؟(دقیق می خواهم آیا روابط در کتاب می باشد ؟) و مدل موتور القایی استفاده شده را نیز بفرمایید ؟ با تشکر
پاسخAdmin
درباره11 سال agoمنبع اش کتاب Control of Electric Machine Drive[Seung-Ki_Sul] می باشد
پاسخali
درباره11 سال agoسلام کار بلوک PID Controller چه می باشد و چرا در کنترل کننده ها از آن استفاده می شود ؟ ممنون
پاسخAdmin
درباره11 سال agoکار بلوک PID کنترل سیستم می باشد بطوری که خروجی بتواند ورودی را دنبال کند.
این کنترل کننده ها از رایج ترین کنترل کننده ها می باشند.
پاسخمرتضی
درباره10 سال agoبا سلام من کنترل اسکالر موتور القایی تک فاز را نیاز دارم اگه راهنمایی منید ممنونم
پاسخAdmin
درباره10 سال agoراجع به کنترل موتور تک فاز باید به کتب ماشین مخصوص و مقالات مراجع کنید.
پاسخarash
درباره10 سال agoبا سلام آیا کد نویسی مربوط به این پروژه موجود است ؟ علاوه بر این من کد نویسی مربوط به روش مستقیم کنترل برداری را نیز میخواستم ؟! با تشکر منتظر پاسختان هستم
پاسخAdmin
درباره10 سال agoخیر فقط سیمولینک آن موجود است.
پاسختینا
درباره10 سال agoبا سلام من موتور القایی را با کمک لینکی که در سایت موجود است شبیه سازی کردم و حالا می خواهم به روش کنترل غیر مستقیم آن را کنترل کنم. در لینک سیمولیکی بالا موتور اقایی به گونه ی دیگری شبیه سازی شده .میشه درمورد چگونه اتصال کنترل کننده به موتور القایی کمکم کنید.
پاسخAdmin
درباره10 سال agoبلوک دیاگرام این روش در بالا قرار داده شده است.
پاسخسعید
درباره10 سال agoسلام خیلی ممنون دستتون درد نکنه موفق باشید ;)
پاسخمهدی
درباره9 سال agoسلام جسارتا اواسط توضیحات : تیتر و عنوان "روش کنترل برداری غیر مستقیم" و "روش کنترل برداری مستقیم" را جابجا ننوشتید ؟
پاسخAdmin
درباره9 سال agoخیر. تیتر و عنوان ها درست می باشند.
پاسخامیر
درباره9 سال agoبا سلام، direct-current control vector به معنای کنترل برداری جریان مستقیم است؟ یا به معنای کنترل برداری مستقیم جریان می باشد؟ با توضیحات شما که دو نوع کنترل برداری داریم پس باید کنترل برداری مستقیم جریان معنی بدهد. درست است؟
پاسخAdmin
درباره9 سال agoبله درست است.
پاسخحجت
درباره9 سال agoبا سلام و تشکر از مطالب مفیدتان. سوالی که داشتم در بحث کنترل موتور القایی direct load control به معنای همان کنترل برداری مستقیم است؟ یا می شود با کنترل غیر مستقیم هم کنترل مستقیم بار داشت؟ و درخواست بعدی اینکه شبیه سازی بخش کنترل برداری مستقیم را می تونید در اختیارم بگذارید. ممنون
پاسخAdmin
درباره9 سال agoچون در موتورهای القایی بار همان گشتاور اعمال شده به موتور است معمولاً عبارت کنترل مستقیم بار استفاده نمی شود و همان کنترل مستقیم گشتاور استفاده می شود. شبیه سازی کنترل برداری مستقیم دارای هزینه می باشد که می توانید از قسمت منوی بالای صفحه سفارش دهید.
پاسخسهیلا
درباره9 سال agoسلام..خسته نباشید..برای شبیه سازی خیلی ممنونم من یک سری سوال دارم..گفته بودید که اطلاعات در بلوک موتور القایی هست..ولی فقط دو یا سه تا از داده ها در بلوک های متفاوت بود...بقیه اطلاعات به خصوص kpو ki و vd و ... موجود نیس..این مقادیر رو چجوری به دست بیارم؟ خیلی ممنونم
پاسخAdmin
درباره9 سال agoروی بلوک inverter و speed controller اگر کلیک کنید مقادیر را خواهید دید.
پاسخسهیلا
درباره9 سال agoو یک سوال دیگه این که مقدار 0.96 اولیه رو برای چی در نظر گرفتید؟ متشکرمم
پاسخAdmin
درباره9 سال agoمقدار شار مرجع است.
پاسخآتنا
درباره9 سال agoبا سلام و عرض بخیر عذر میخوام روش شبیه سازی فوق کنترل به روش هسترزیس است، در واقع کنترل برداری نیست. درسته؟
پاسخAdmin
درباره9 سال agoفکر کنم شما دچار یک اشتباه شده اید. این شبیه سازی همان روش کنترل برداری است و از روش کنترل هیسترزیس برای کنترل جریان آن استفاده شده است. برای کنترل جریان می توان از روش pwm نیز استفاده کرد.
پاسخآتنا
درباره9 سال agoسلام. بله حق با شماست. من از روش FOC استفاده کرده ام و متاسفانه شبیه سازی ام جواب نمیده و به نظرم بلوک ها رو درست قرار داده ام. عذر می خوام در سایت شما شبیه سازی به روش FOC قرار ندارد؟
پاسخAdmin
درباره9 سال agoدر همین پست شبیه سازی به روش FOC موجود است و می توانید دانلود کنید و استفاده کنید.
پاسخمجنون
درباره9 سال agoروش کنترل برداری غیر مستقیم با استفاده از sim power matlab
پاسخAdmin
درباره9 سال agoمی توانید از قسمت پروژه ها، پروژه شماره P16 را سفارش بدهید.
پاسخامیر
درباره8 سال agoسلام....اینورتری که در پروژه بالا استفاده شده SPWM هست؟ باتشکر.
پاسخAdmin
درباره8 سال agoمی توان از هر روش کنترلی استفاده کرد.
پاسخامیر
درباره8 سال agoنه حالا می خواستم ببینم در پروژه بالا اینورتر از نوع SPWM هست یا نه؟
پاسخAdmin
درباره8 سال agoروش کنترلی که در اینجا استفاده شده استفاده از کنترل هیسترزیس می باشد نه spwm.
پاسخمصطفی
درباره8 سال agoسلام مهندس میشه pdf این کتاب Control of Electric Machine Drive[Seung-Ki_Sul] رو برام ایمیل کنید ممنون
پاسخAdmin
درباره8 سال agoاز لینک زیر دانلود کنید:
libdl.ir
پاسخمصطفی
درباره8 سال agoسلام مهندس میشه شبیه سازی به روش FOC را توضیح بدین یا لینکی معرفی کنید تا بتونم از شبیه سازی که انجام دادین سر در بیارم باتشکر
پاسخAdmin
درباره8 سال agoتصاویر و روابط موجود در پست برای توضیح این روش کافی می باشد.
پاسخFAEZE
درباره8 سال agoسلام ممنون روابط رو برای جهت دهی با شار استاتور که خیلی در مقالات استفاده میشه با قاب مرجع سنکرون هم اگه ممکنه بذارید یا مرجع برای اون معرفی بفرمایید
پاسخAdmin
درباره8 سال agoبهترین مرجع کتاب Peter.Vas است که می توانید به آن مراجعه کنید.
انواع جهت دهی ها را با روابط کامل توضیح داده است.
پاسخFAEZE
درباره8 سال agoاسم کتاب نه نام نویسندش لطفا ؟ برای حل معادلات حالت هم مرجع لطفا
پاسخAdmin
درباره8 سال agoاسم کتاب :
Sensorless Vector and Direct Torque Control by Peter Vas
است.
پاسخAmir
درباره8 سال agoسلام. توضیحات راجع به عملکرد هر بلوک و زیر سیستم ها نیاز دارم. ممنون از سایت خوبتون.
پاسخAdmin
درباره8 سال agoمی توانید از قسمت سفارش شبیه سازی درخواست خود را ارسال نمایید.
پاسخFAEZE
درباره7 سال agoبا سلام اون قسمت از متن که نوشته شده انواع جهت دهی سه روش هست و مزایا و معایب را نوشتید دقیقا از کدام مرجع است ؟؟از کتاب seung ki sul پیدا نکردم از قسمت معادلات بود .از کتاب peter vas فک نکنم بوده باشه ؟ لطفا میشه صفحه یا بخش کتابش رو هم بفرماین
پاسخAdmin
درباره7 سال agoاز کتاب peter vas می باشد. صفحه دقیق آن را نمی دانم.
پاسخ