طراحی کنترل کننده با تولباکس Matlab (بخش دوم)
در قسمت قبل نحوه ایجاد ساختار یک سیستم کنترلی را با تولباکس Control System Tuning شرح دادیم. معمولاً یکی از مهمترین مشکلات در مورد کنترل کننده ها نحوه تنظیم کنترل کننده می باشد زیرا با تنظیم نامناسب کنترل کننده ممکن است سیستم ناپایدار شود. برای حل این مشکل از محیط تنظیم اتوماتیک (Automated Tuning) کمک می گیریم.
برای تنظیم کردن کنترل کننده 5 روش زیر وجود دارد:
- تنظیم بر اساس بهینه سازی (Optimization-Based Tuning): در این روش پارامترهای جبرانساز بر اساس نیاز مورد نظر با روش های بهینهسازی تنظیم می شود.
- تنظیم کنترل کننده PID : در این روش با انتخاب نوع کنترل کننده و روش تنظیم کردن (روش کلاسیک یا روش پاسخ زمانی مقاوم)، جبرانساز را تنظیم می کنید.
- تنظیم به روش کنترل مدل داخلی (IMC) : در این روش با استفاده از روش طراحی IMC یک فیدبک پایدارکننده طراحی می شود.
- تنظیم به روش (LQG) : در این روش یک فیدبک پایدارکننده بر اساس دنبال کننده LQG طراحی می شود.
- تنظیم به روش (Loop Shaping) : در این روش با استفاده از پهنای باند حلقه باز یک فیدبک پایدارکننده طراحی می شود.
برای هر روشی که انتخاب می کنید باید مراحل زیر را انجام دهید:
- انتخاب جبرانساز
- مشخص کردن رفتار مورد نظرتان برای پاسخ سیستم
- کلیک بر روی گزینه Update Compensator برای اعمال تنظیمات بر روی جبرانساز
روش Optimization-Based Tuning :
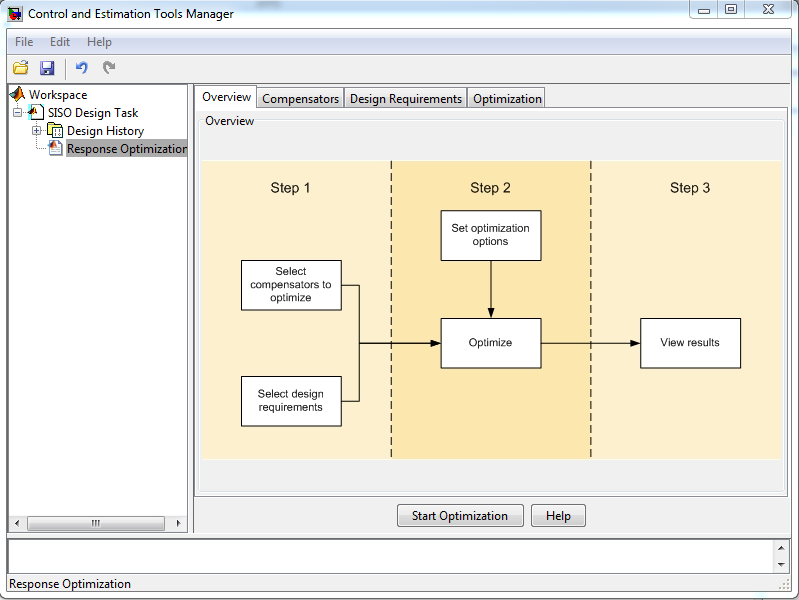
برای تنظیم کنترل کننده به روش بهینه سازی پس از انتخاب این روش روی گزینه Optimize Compensator کلیک کرده تا وارد قسمت زیر شوید:
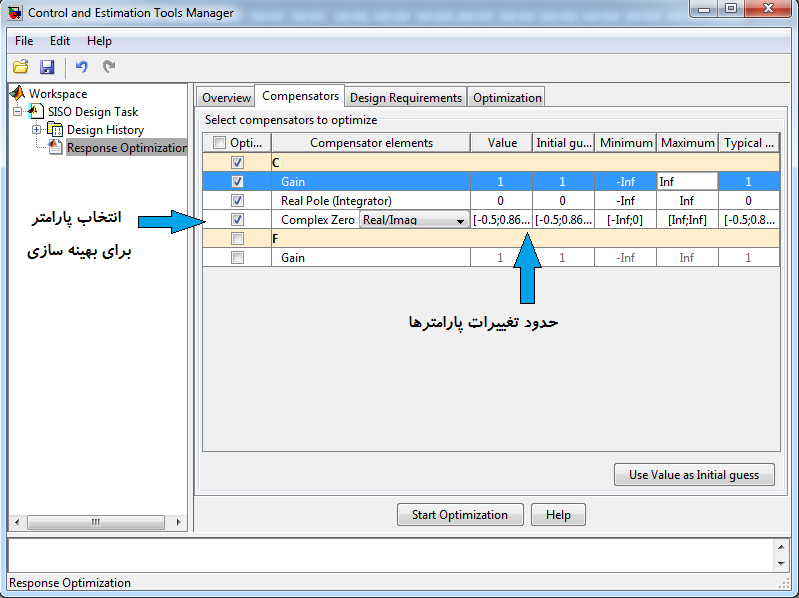
در تب Compensators می توانید مشخص کنید که از کدام پارامترها برای بهینه سازی استفاده شود. با انتخاب هر پارامتر می توانید حدود تغییرات آن را نیز مشخص کنید:
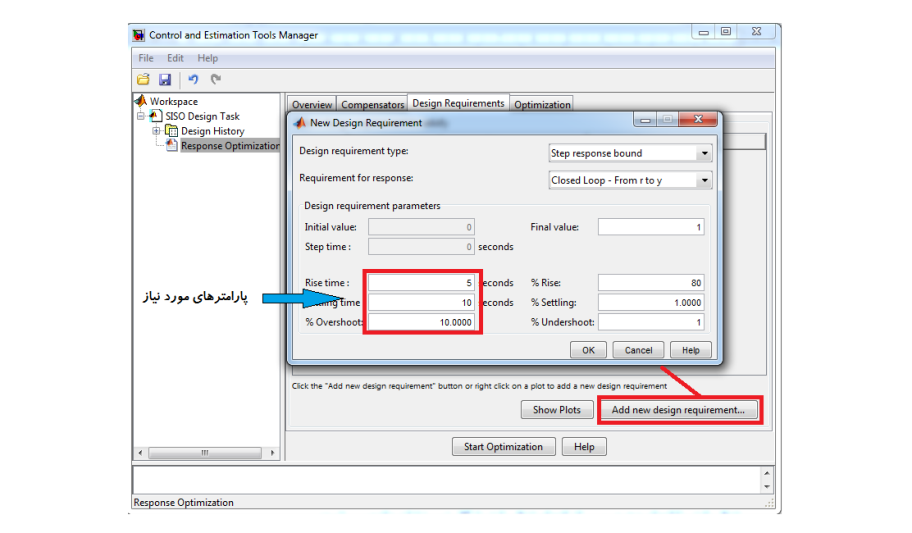
در قسمت Design Requirements بر روی گزینه Add new design requirement کلیک کنید تا صفحه زیر باز شود:
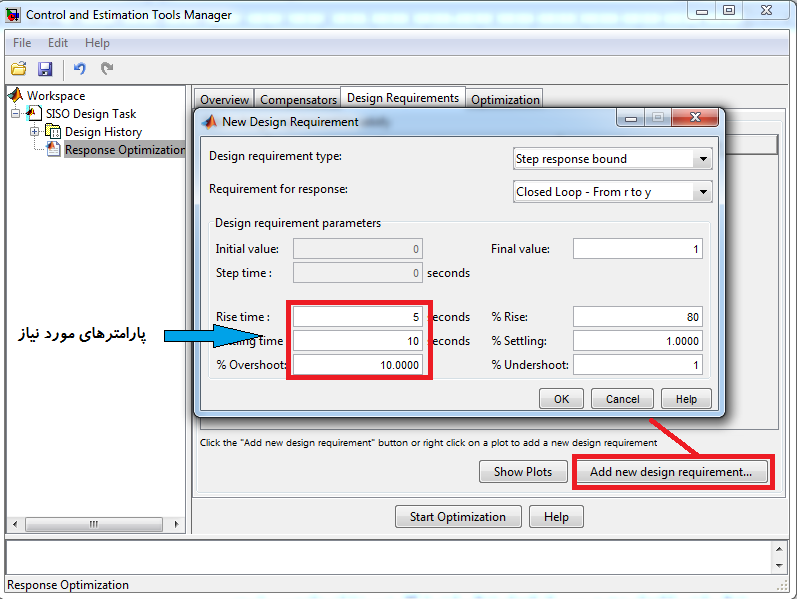
در این قسمت نیازهای خود از کنترل کننده را انتخاب کنید. برای مثال اگر می خواهید پاسخ خروجی به ورودی پله دارای زمان جهش 5 ثانیه و زمان نشت 10 ثانیه و اورشوت 10درصد باشد مانند بالا تنظیمات را انجام دهید. پس از انجام تنظیمات شکل زیر نشان داده می شود:
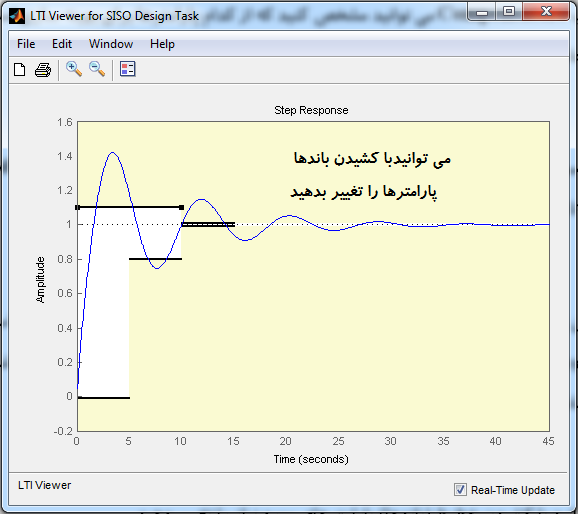
می توانید با کشیدن خطوط (باندها) پارامترهای مورد نیاز را تغییر دهید.
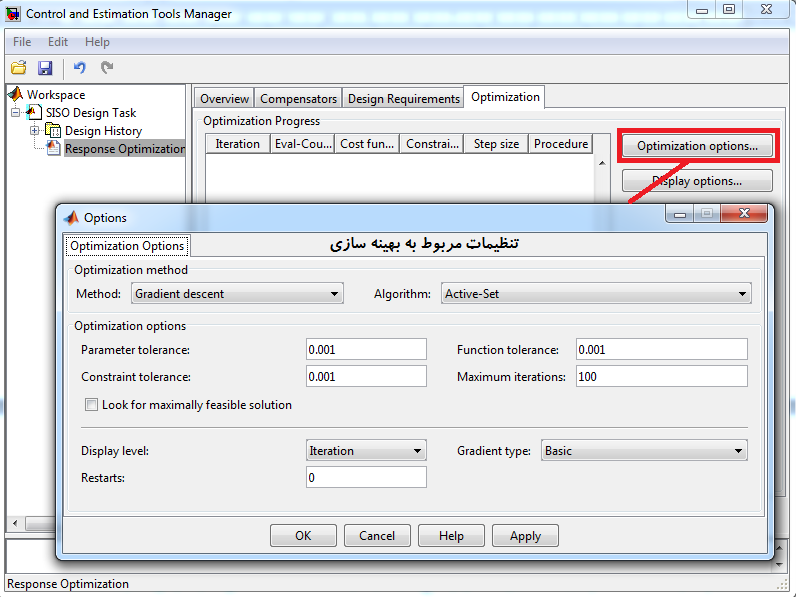
در تب Optimization بر روی گزینه Optimization Options کلیک کنید تا بتوانید تنظیمات مربوط به روش بهینه سازی را انتخاب کنید:
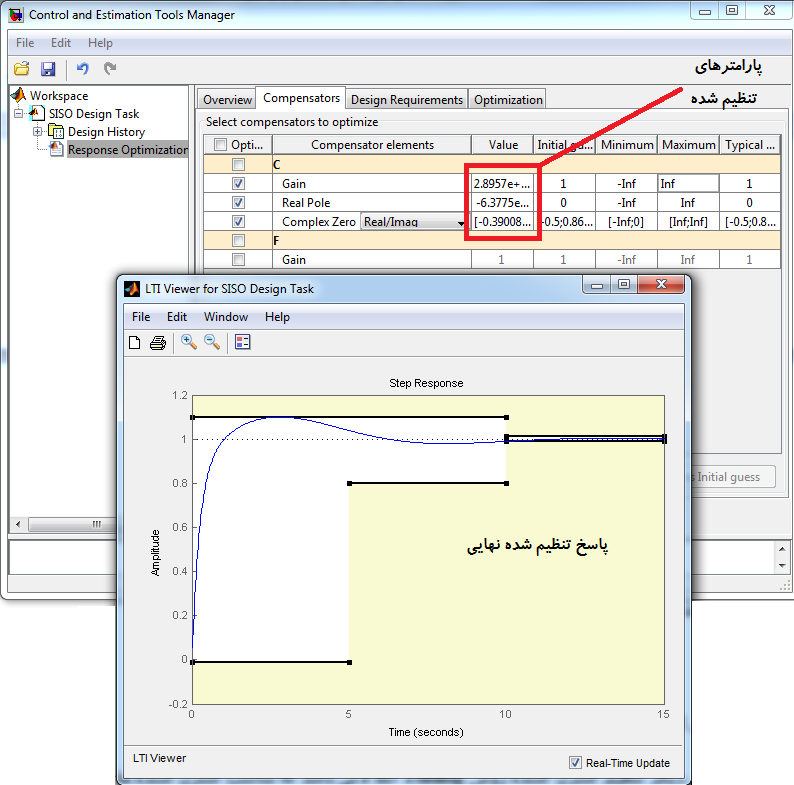
حال بر روی گزینه Start Optimization کلیک کنید تا بصورت اتوماتیک پارامترهای کنترل کننده تنظیم شوند. در هنگام بهینه سازی شکل پاسخ در هر مرحله نشان داده می شود. پس از پایان بهینه سازی روی تب Compensator بروید تا مقادیر بهینه سازی شده برای پارامترهای انتخاب شده را مشاهده کنید:
روش PID Tuning :
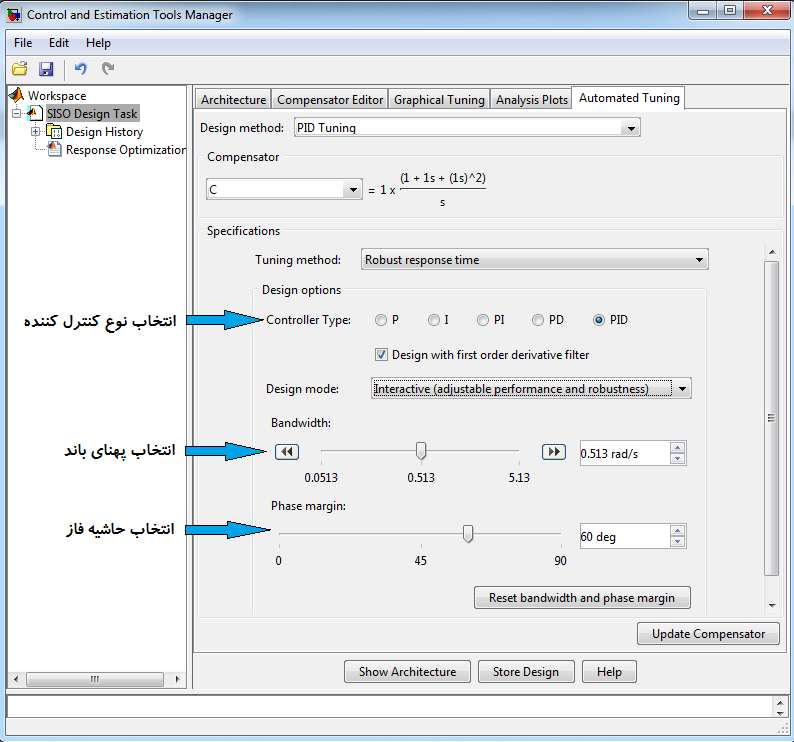
روش دیگر تنظیم کنترل کننده روش PID Tuning می باشد که مناسب کنترل کننده های PID می باشد. با انتخاب این روش صفحه زیر نمایش داده می شود:
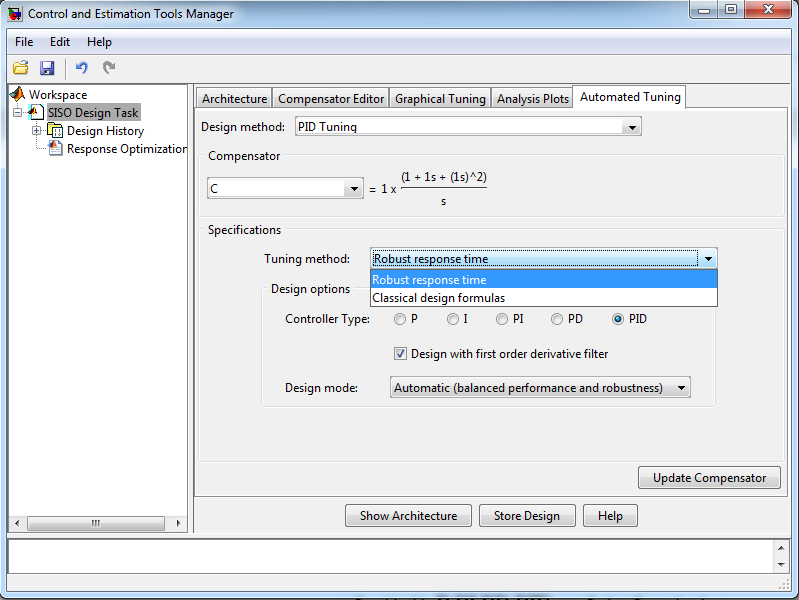
در ابتدا نوع کنترل کننده P,PI,PD,PID را انتخاب کنید.
همان طور که مشخص است دو روش برای تنظیم پارامترهای کنترل کننده PID وجود دارد:
1) روش Robust response time :
این روش پارامترهای کنترل کننده را بر اساس پهنای باند و حاشیه فازی که مشخص می کنیم طوری تنظیم می کند که سیستم پایدار شود. توجه کنید که اگر گزینه Automatic را انتخاب کنید روش پهنای باند و حاشیه فاز را خود انتخاب می کند:
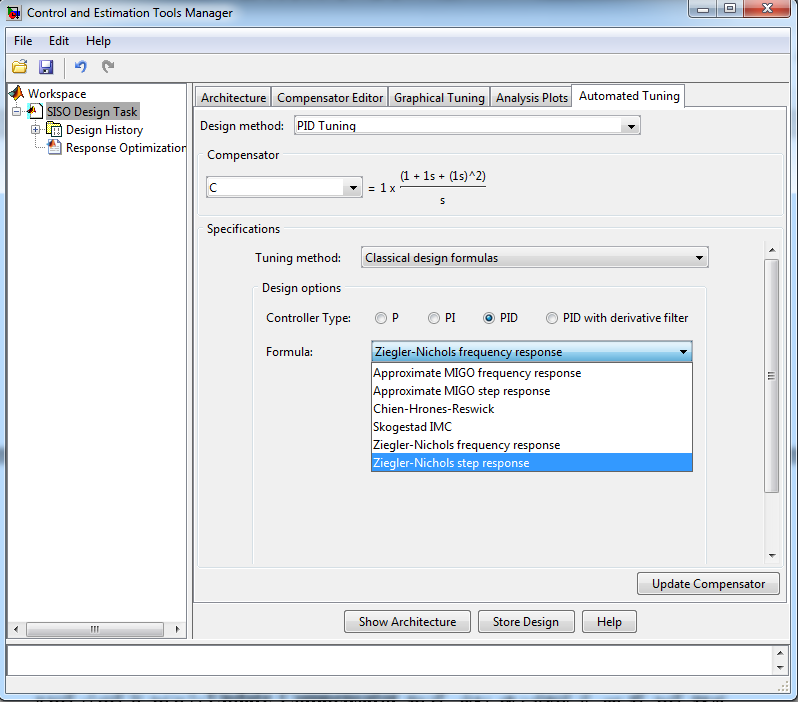
2) روش Classical design formulas :
این روش بر اساس فرمول های کلاسیک که شامل 6 روش می شود کنترل کننده را تنظیم می کند که معروفترین این روش ها روش پاسخ پله و پاسخ فرکانسی زیگلرنیکولز می باشند:
توجه کنید که پس از انتخاب هر روش گزینه Update Compensator را بزنید تا کنترل کننده تنظیم شود.
روش IMC :
روش بعدی برای تنظیم پارامترهای کنترل کننده روش IMC می باشد. این روش یک کنترل کننده تمام درجه را طوری طراحی می کند که پایداری سیستم تضمین شود. همان طور که از شکل زیر مشخص است برای طراحی کنترل کننده IMC دو پارامتر را می توان تغییر داد:
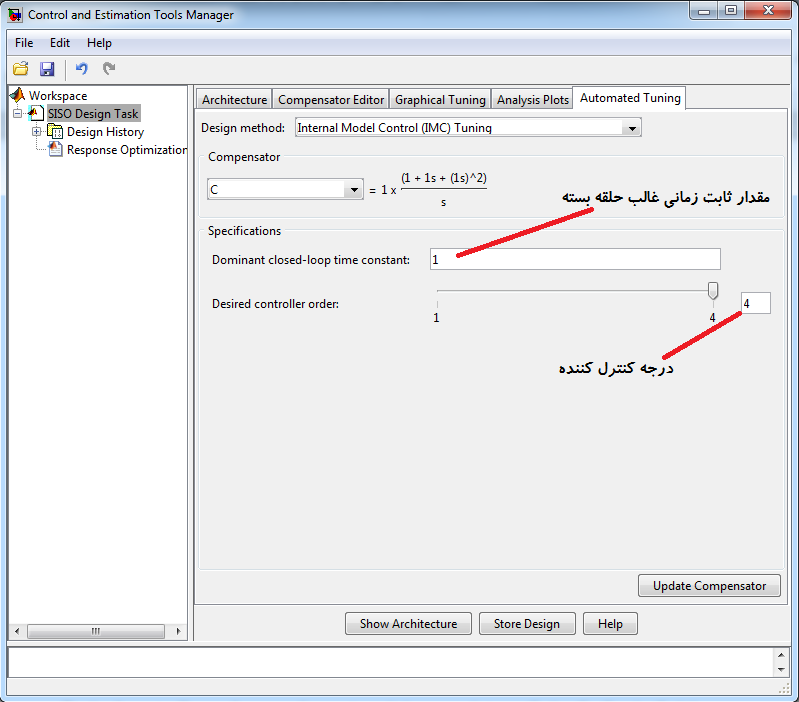
در قسمت Dominant closed-loop time constant باید مقدار ثابت زمانی غالب سیستم را مشخص کنید. بطور کلی افزایش این مقدار سیستم حلقه بسته را کند می کند و آن را مقاوم تر می کند.
بعد ازاینکه فیدبک کنترل کننده تمام درجه طراحی شد در قسمت Desired controller order می توانید با کاهش مقدارش، درجه کنترل کننده را کاهش بدهید. توجه کنید که ممکن است با کاهش درجه پایداری سیستم از دست برود.
روش LQG Synthesis :
روش بعدی روش LQG Synthesis می باشد که در این روش نیز یک کنترل کننده فیدبک تمام درجه طوری طراحی می شود که پایداری سیستم تضمین شود:
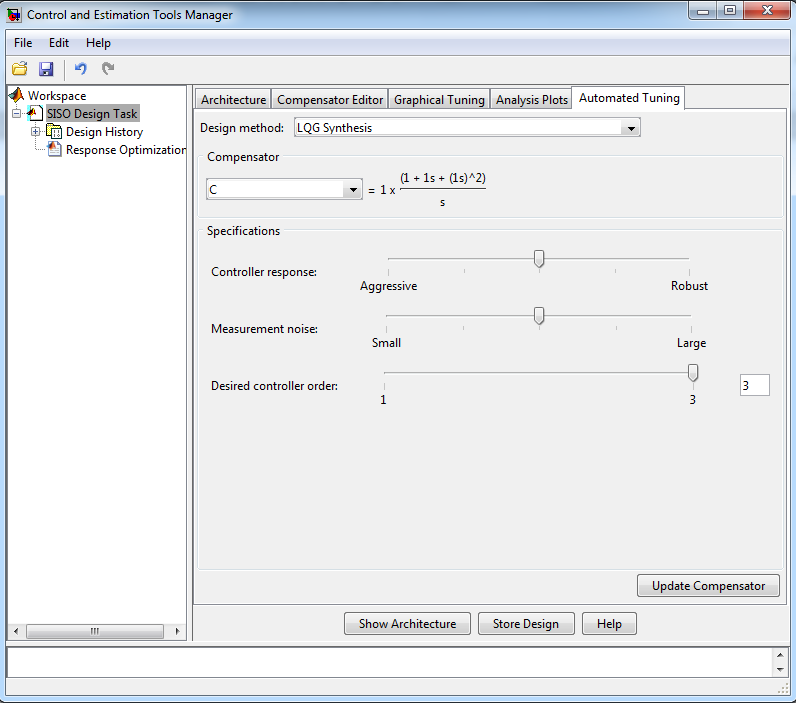
همان طور که مشخص است در قسمت Controller response می توانید پاسخ کنترلر را انتخاب کنید. هرچقدر به سمت aggressive بروید پاسخ کنترلر تهاجمی تر می شود بدین معنی که اورشوت بیشتری خواهیم داشت. اگر مدل ما دقیق و متغیر قابل دستکاری دارای رنج وسیع باشد استفاده از کنترلر تهاجمی پیشنهاد می شود.
در قسمت بعد باید میزان نویز اندازه گیری شده را مشخص کنید. اگر خروجی سیستم دارای نویز کمی می باشد به سمت Small و اگر نویز زیاد بود به سمت Large می رویم. هرچقدر به سمت نویز زیاد برویم کنترلر در مقابل نویز اندازه گیری شده مقاوم تر می شود.
در قسمت آخر نیز می توانید درجه کنترل کننده را انتخاب کنید.
روش Loop Shaping :
روش آخر تنظیم پارامترهای کنترل کننده روش Loop Shaping می باشد. این روش نیز یک کنترل کننده فیدبک پایدار ساز را طوری طراحی می کند که تا حد امکان به شکل حلقه مورد نظر شبیه شود. برای مشخص کردن شکل حلقه پهنای باند یا پاسخ فرکانسی حلقه باز را باید مشخص کرد.
برای طراحی کنترل کننده با این روش دو گزینه موجود می باشد:
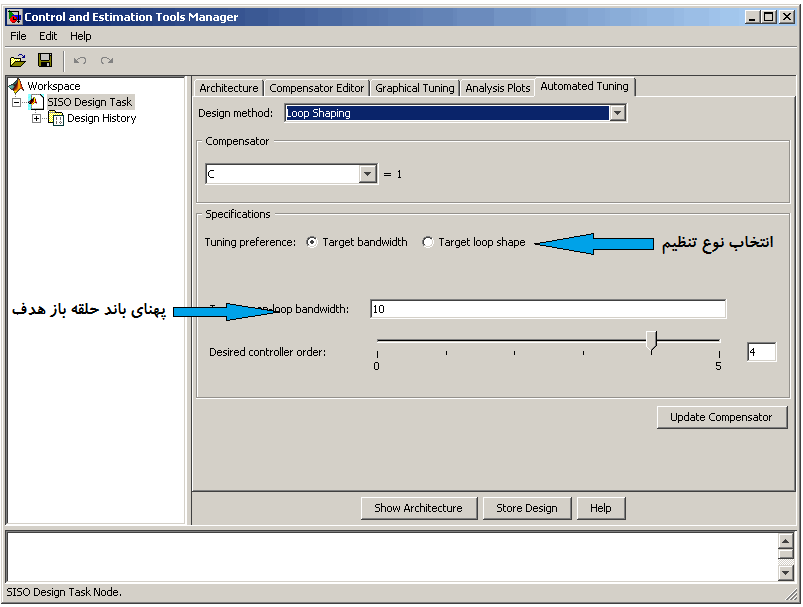
1) طراحی به روش پهنای باند هدف (Target bandwidth) :
باید پهنای باند هدف مانند شکل زیر مشخص شود:
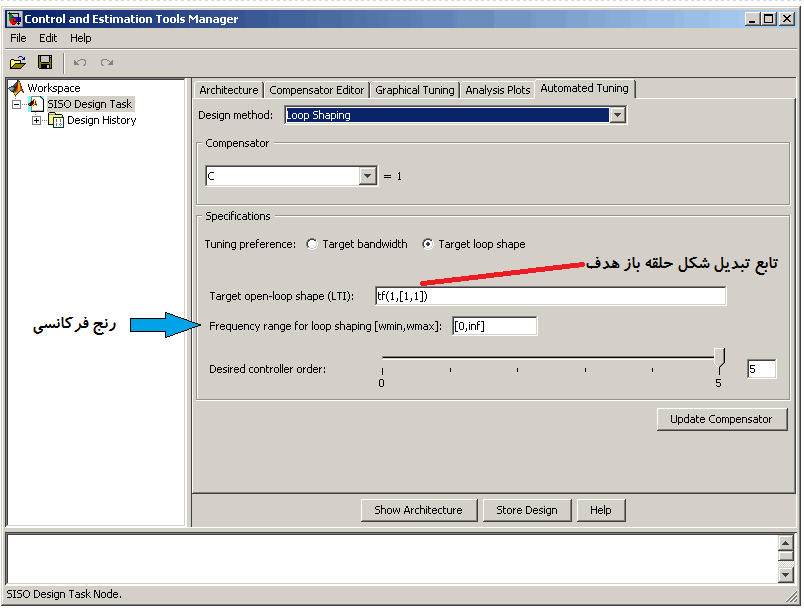
2) طراحی به روش شکل حلقه هدف (Target loop shape) :
باید شکل حلقه باز هدف بصورت تابع تبدیل یا معادلات حالت و … مشخص شود:
توجه کنید که پس از انتخاب هر روش حتماً گزینه Update Compensator را برنید تا پارامترهای کنترل کننده تنظیم شوند.
در قسمت بعد کنترل کننده یک موتور DC را بوسیله این تولباکس طراحی می کنیم.




No Comments