مدل ماشین سنکرون در دستگاه DQ
بدلیل اهمیت ماشین سنکرون بعنوان تولید کننده انرژی در سیستم قدرت و همچنین برای بررسی مسائل پایداری سیستم نمی توان از مدل ساده ژنراتور سنکرون استفاده کرد و باید به سراغ مدل دقیق تری که بتواند حالت های گذرا و دینامیکی را نیز مدل کند رفت. از آنجا که تبدیل dq می تواند متغیرهای ماشین را در یک چارچوب مدل کند و حل معادلات متغیر با زمان را تسهیل کند، در این قسمت مدل dq ماشین سنکرون را دست می آوریم.
در این قسمت ابتدا معادلات ماشین سنکرون قطب برجسته را بدست آورده و به سمت استاتور منتقل می کنیم. سپس با اعمال تبدیل dq بر روی معادلات، مدل ماشین سنکرون را در دستگاه dq که با سرعت محور در حال چرخش است، بدست می آوریم.
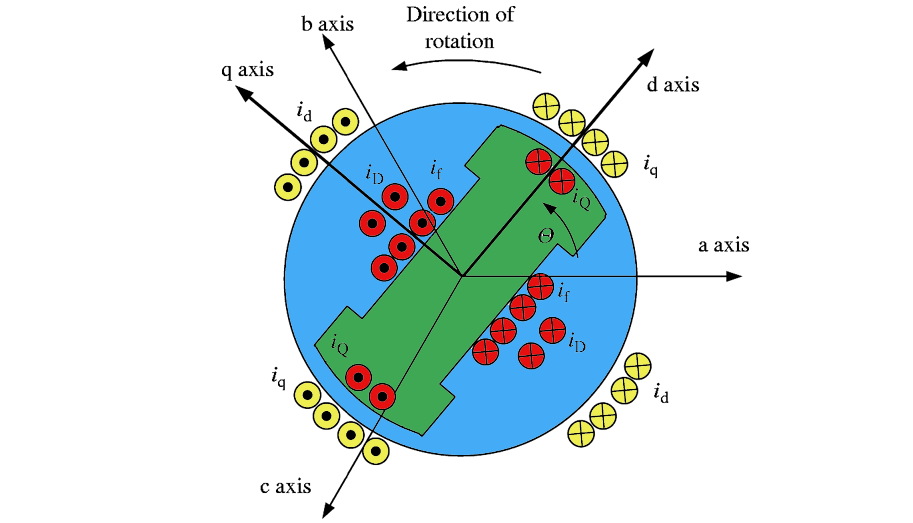
سیم پیچی استاتور و روتور ماشین سنکرون قطب برجسته متعادل با توزیع سینوسی را بصورت زیر در نظر بگیرید:
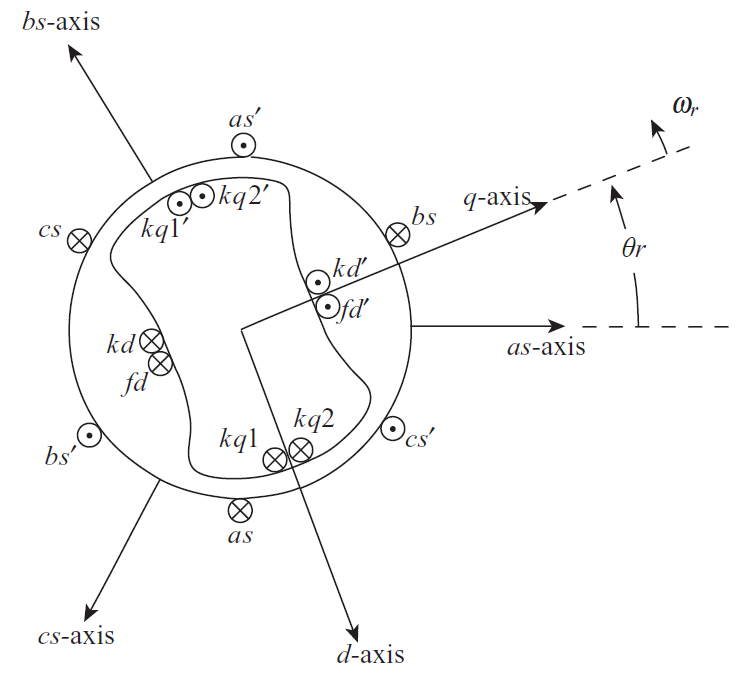
که می توان آن را بصورت زیر نمایش داد:
همان طور که مشخص است روتور دارای یک سیم پیچی میدان (fd) و سه سیم پیچی دمپر می باشد. سیم پیچی های دمپر هر سه اتصال کوتاه بوده و علت استفاده از آنها مسائل مربوط به پایداری ژنراتور می باشد که اغتشاشات را سریع از بین ببرند. سیم پیچی دمپر kd بر روی محور d و سیم پیچی های kq1 و kq2 نیز بر روی محور q قرار گرفته اند.
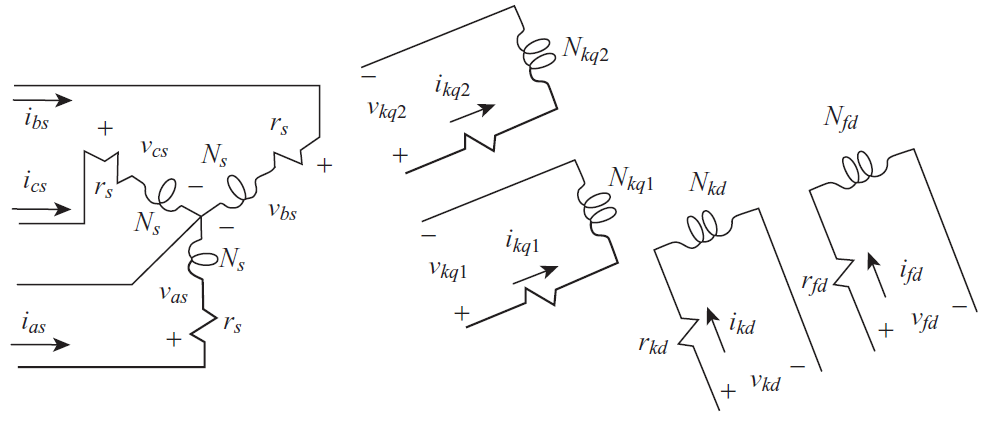
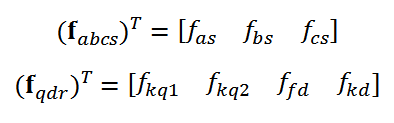
می توان معادله ولتاژ استاتور و روتور را بصورت زیر نوشت:
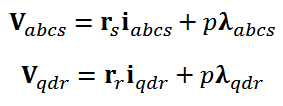
که اندیس s مربوط به پارامترهای استاتور و r مربوط به پارامترهای روتور می باشد و همچنین ماتریس متغیرها بصورت زیر می باشد:
ماتریس های rs و rr یک ماتریس قطری می باشند. برای سیستم های خطی مغناطیسی، رابطه شار نشتی را بصورت زیر می توان نوشت:
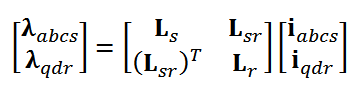
توجه کنید که Ls اندوکتانس بین سیم پیچی های استاتور، Lr اندوکتانس بین سیم پیچی های روتور و Lsr اندوکتانس متقابل بین سیم پیچی های استاتور و روتور می باشد. چون روتور را قطب برجسته در نظر گرفتیم با چرخش آن میزان اندوکتانس های استاتور نیز با زمان تغییر می کند. برای بدست آوردن اندوکتانس Ls شکل زیر را در نظر بگیرید:
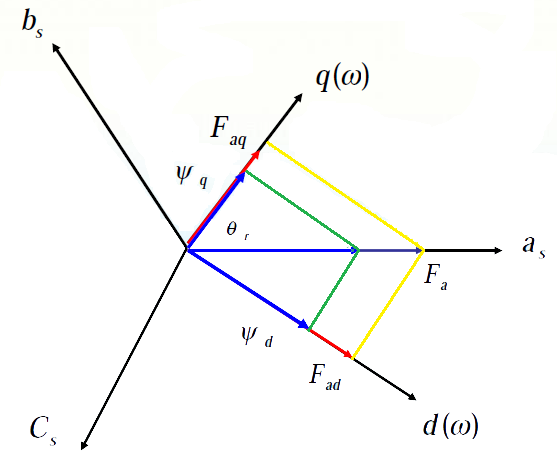
پس می توان نوشت:
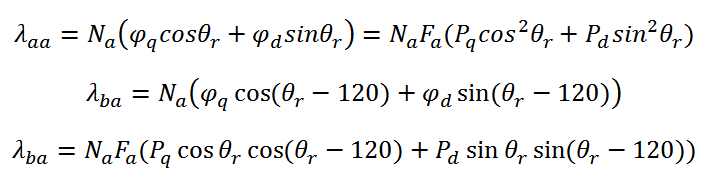
که P پرمانس مسیر شار (عکس مقاومت مغناطیسی) می باشد. پس برای محاسبه اندوکتانس های سیم پیچی استاتور داریم:
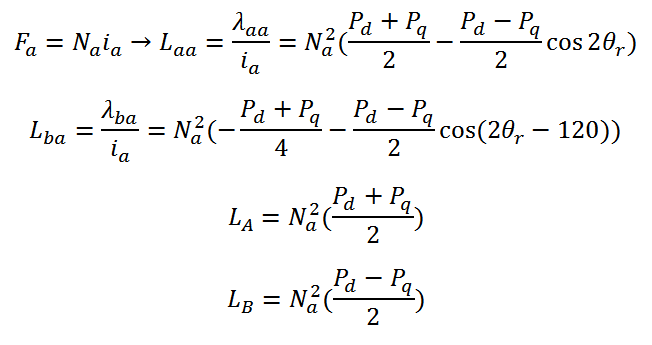
بنابراین ماتریس Ls بصورت زیر تعریف می شود:
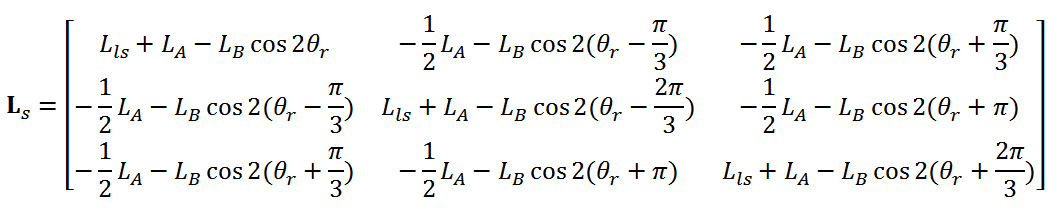
توجه کنید که مقدار LA بزرگتر از LB می باشد و برای روتور استوانه ای (غیر برجسته) مقدار LB برابر صفر می باشد.
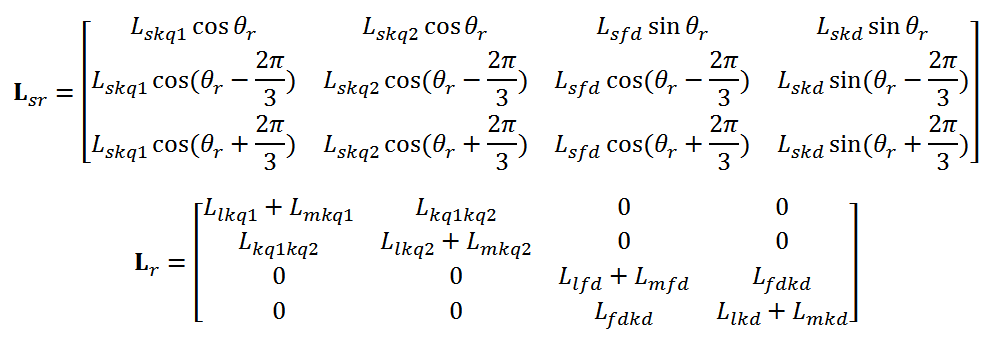
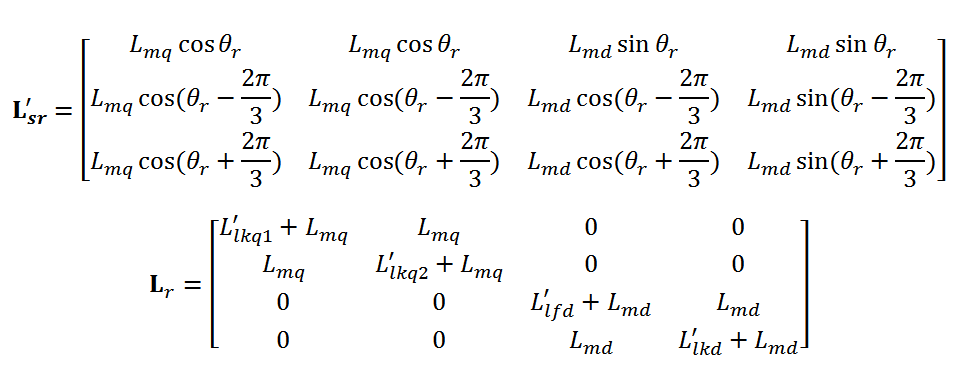
ماتریس های Lsr و Lr نیز بصورت زیر تعریف می شوند:
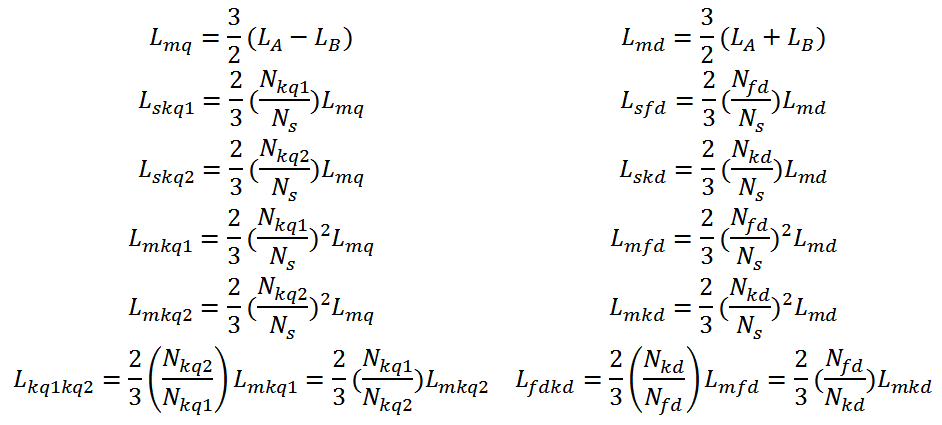
با تعریف اندوکتانس مغناطیسی بصورت زیر پارامترهای ماتریس های اندوکتانس بالا بصورت زیر محاسبه می شوند:
حال باید مقادیر ولتاژ، جریان، شار و همچنین اندوکتانس نشتی سیم پیچی ها و مقاومت آنها را به سمت استاتور ارجاع داد. با توجه به تعداد دورهای سیم پیچی استاتور و روتور داریم:
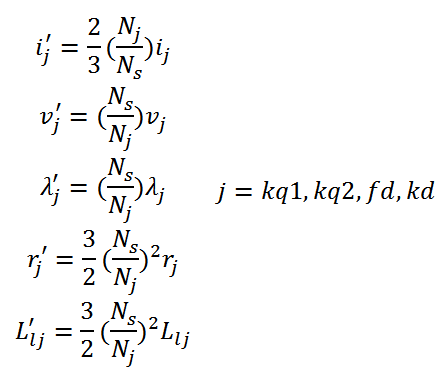
بنابراین ماتریس های اندوکتانس متقابل و روتور بصورت زیر تبدیل می شوند:
بنابراین معادلات ولتاژ بصورت زیر تبدیل می شوند:
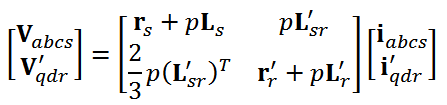
تا اینجا روابط را بسمت استاتور انتقال داده ایم. همان طور که از روابط مشخص است کمیت های فازها به هم وابسته و ماتریس اندوکتانس نیز با زمان تغییر می کند. برای حل این مشکلات معادلات از تبدیل dq0 که با سرعت سنکرون می چرخد استفاده می کنیم.
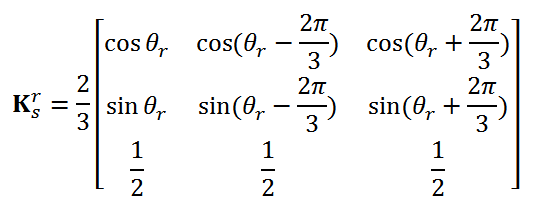
توجه کنید چون مولفه های روتور خود بر روی قاب مرجع هستند نیازی به تبدیل ندارند و فقط مولفه های استاتور تبدیل می شوند.
ماتریس انتقال dq برای انتقال پارامترهای استاتور به قاب مرجع dq عبارت است از:
بنابراین با انتقال معادلات بالا به قاب مرجع dq و با ساده سازی روابط، معادلات ولتاژ در قاب مرجع dq بصورت زیر محاسبه می شوند:
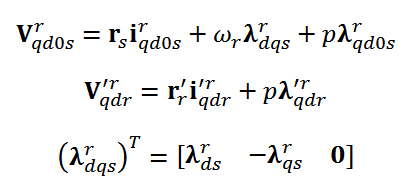
که قسمت اول مربوط به ولتاژ اهمی، قسمت دوم مربوط به ولتاژ حرکتی و قسمت سوم مربوط به ولتاژ ترانسفورمری می باشد.
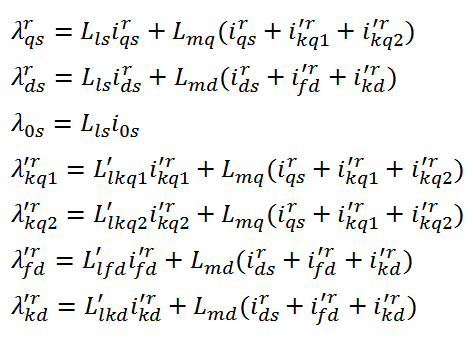
شارهای نشتی نیز بصورت زیر محاسبه می شود:
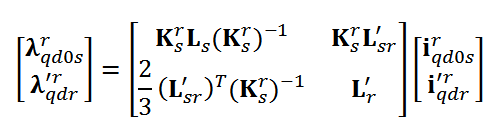
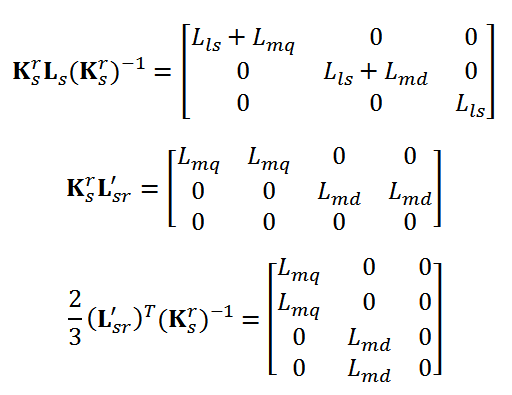
که هر یک از درایه ها ی ماتریس بالا بصورت زیر محاسبه می شود:
باز شده ی ماتریس معادلات ولتاژ dq بصورت زیر می باشد:
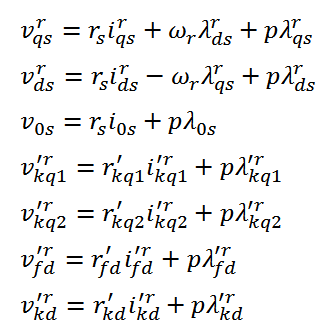
که مقادیر شار نشتی بصورت زیر محاسبه می شود:
با استفاده از معادلات بالا می توان مدل ماشین سنکرون را بصورت زیر بدست آورد:
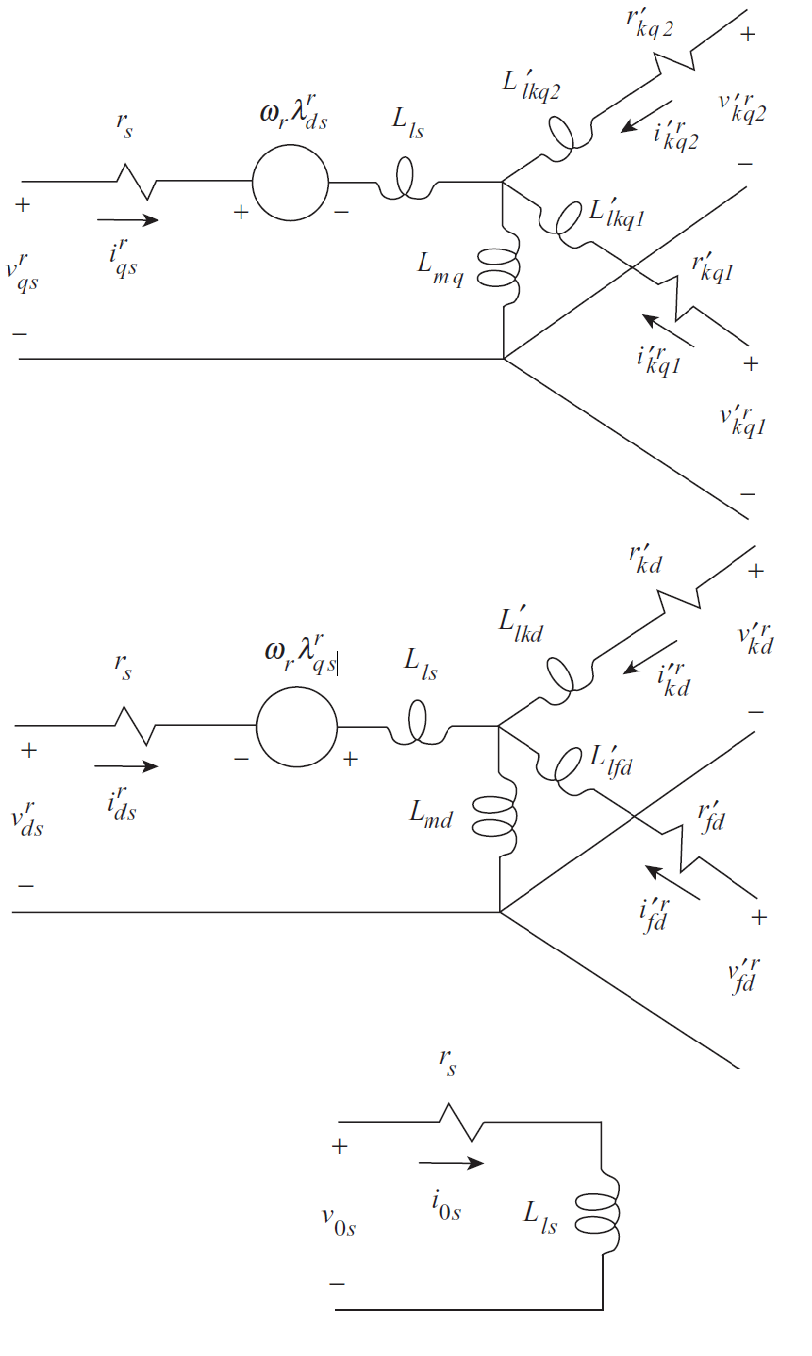
توجه کنید که مدار معادل بصورت کلی رسم شده است و در اصل باید سیم پیچی های دمپر را اتصال کوتاه در نظر بگیریم.




15 Comments
پرنیان
درباره10 سال agoسلام، وقتتون بخیر من برای یکی از پروژه هام به" شبیه سازی حالت گذرای ماشین سنکرون با در نظر گرفتن تاثیر اشباع مغناطیسی هسته " نیاز دارم. شما این شبیه سازی را در وبلاگتون دارید؟
پاسخAdmin
درباره10 سال agoدر خود نرم افزار Matlab بلوک ماشین سنکرون دارای گزینه اشباع است که با فعال کردن آن می توانید از آن استفاده نمایید.
پاسخسید
درباره9 سال agoبسیار عالی بود
پاسخحامد
درباره9 سال agoسلام، تشکر می کنم از مطالب آموزنده ای که قرار می دهید. من شبیه سازی سیمولینک آلفا\بتا به dq را مخواستم. یعنی سه فاز abc ورودی را تبدیل به ولتاژ vd و vq بکند.در صورت امکان جواب را ایمیل کنید. تشکر از شما
پاسخAdmin
درباره9 سال agoدر مدل سیمولینکی که برای موتور القایی قرار داده شده بلوک dq موجود است که می توانید از آن برای تبدیل سه فاز به دو فاز vdq استفاده کنید. اگر تبدیل آلفا/بتا به dq را می خواهید می توانید از رابطه زیر استفاده نمایید: vd=cos(wt)*va+sin(wt)*vb vq=-sin(wt)*va+cos(wt)*vb
پاسخحامد
درباره9 سال agoسلام، تشکر می کنم به خاطر سایت مفیدتان و اینکه جواب سوال قبلی ام را داده اید. آیا مدل سیمولینکی تبدیل abc سه فاز به vd, vq در موتور سنکرون آهنربای دائم (PMSM) با موتور القایی فرق نمی کند؟؟ اگر فرق می کند لطفا مدل سیمولینکی تبدیل abc به vd, vq در موتور سنکرون اهنربای دائم را ارسال کنید. با تشکر از شما.
پاسخAdmin
درباره9 سال agoباید به معادلاتی که از روی آن دارید شبیه سازی را انجام می دهید توجه کنید. ممکن است در یک مقاله از تبدیل پارک و در دیگری از تبدیل کنکوردیا استفاده کرده باشد. همچنین ممکن است که در مقالات مختلف جای محورهای d و q را نیز جابجا فرض کنند.
پاسخهومان
درباره9 سال agoبا سلام , در روش کنترل مستقیم گشتاور موتورهای pmsm نیاز به شار مرجع می باشد.شار مرجع چگونه بدست آورده می شود.
پاسخAdmin
درباره9 سال agoدر صفحه ۲۲۹ کتاب دکتر Peter Vas نحوه محاسبه شار مرجع آورده شده است.
پاسخامیر
درباره9 سال agoسلام...اگه ماشین سنکرون با معادلات بالا که نوشتید رو بخوام با AVR و Exciter به کار ببرم می تونم بلوک آماده این ها تو سیمولینک را با معادلات بالا لینک کنم یا باید از نو معادلات نوشته بشه؟ باتشکر.
پاسخAdmin
درباره9 سال agoفکر نکنم مشکلی وجود داشته باشد. فقط توجه داشته باشید که مقادیر ورودی AVR و Exciter مقادیر پریونیت را میگیرند و یا نه.
پاسخBita
درباره8 سال agoسلام با تشکر از سایت عالی، لطفا مقاله انگلیسی از این شبیه سازی رو یا شبیه سازی های دیگه درمورد ماشین الکتریکی رو ارسال نمایید سپاس
پاسخAdmin
درباره8 سال agoمی توانید به کتاب تئوری جامع ماشین های الکتریکی کراس مراجعه کنید.
پاسخعلي
درباره8 سال agoسلام شبيه سازي تبديل پارك در متلب رو تبديل iabc به idq رو چطور بايد نوشت
پاسخAdmin
درباره8 سال agoدر پست شبیه سازی موتور القایی در دستگاه dq نحوه شبیه سازی قرار داده شده است.
پاسخ