موتور القایی و مدل آن (بخش دوم)
معادلات توان و گشتاور موتور القایی
در یک موتور القایی سه فاز با توجه به مدار معادل، نحوه توزیع توان بصورت زیر است:
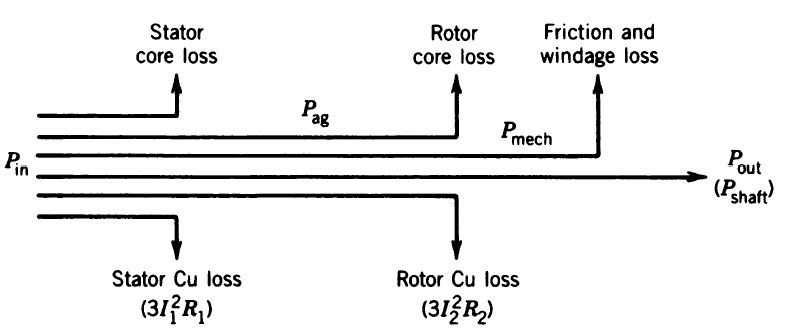
که مقدار هر یک از رابطه های زیر محاسبه می شود:
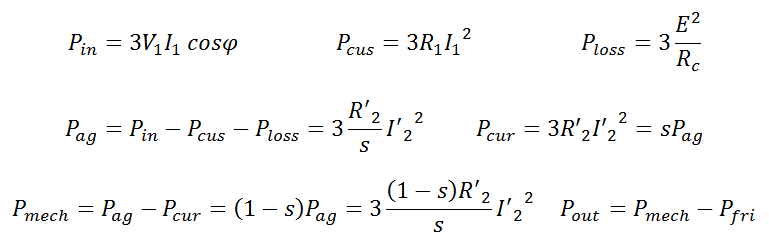
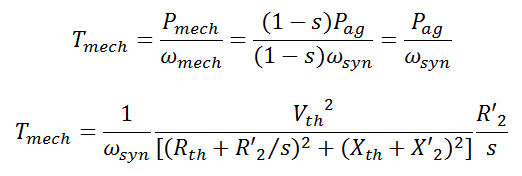
حال با استفاده از رابطه توان مکانیکی، برای بدست آوردن گشتاور موتور از رابطه زیر استفاده می کنیم:
منحنی تغییرات گشتاور بر حسب لغزش بصورت زیر می باشد:
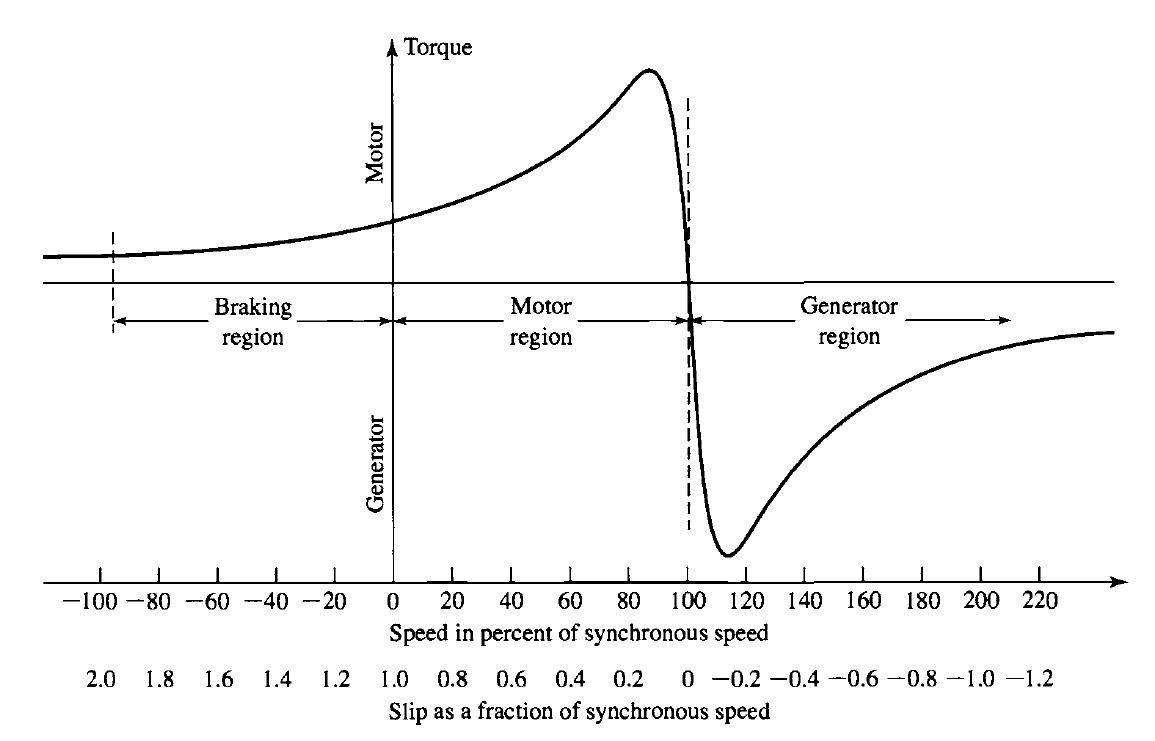
همان طور که مشخص است ماشین های القایی در سه حالت کلی زیر می توانند مورد بهره برداری قرار گیرند:
-
حالت موتوری (motoring mode)
-
حالت ژنراتوری (generating mode)
-
حالت ترمزی (Braking mode)
برای تعیین گشتاور ماکزیمم (لغزش ماکزیمم) از رابطه زیر استفاده می کنیم:
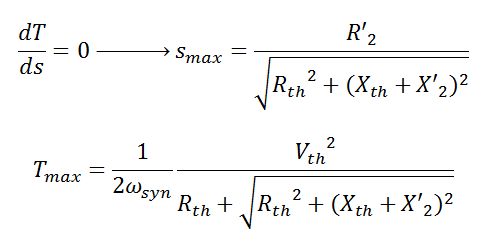
همان طور که از رابطه بالا مشخص است لغزش ماکزیمم به مقاومت روتور وابسته است. نحوه تغییرات منحنی گشتاور بر حسب تغییرات مقاومت روتور بصورت زیر می باشد:
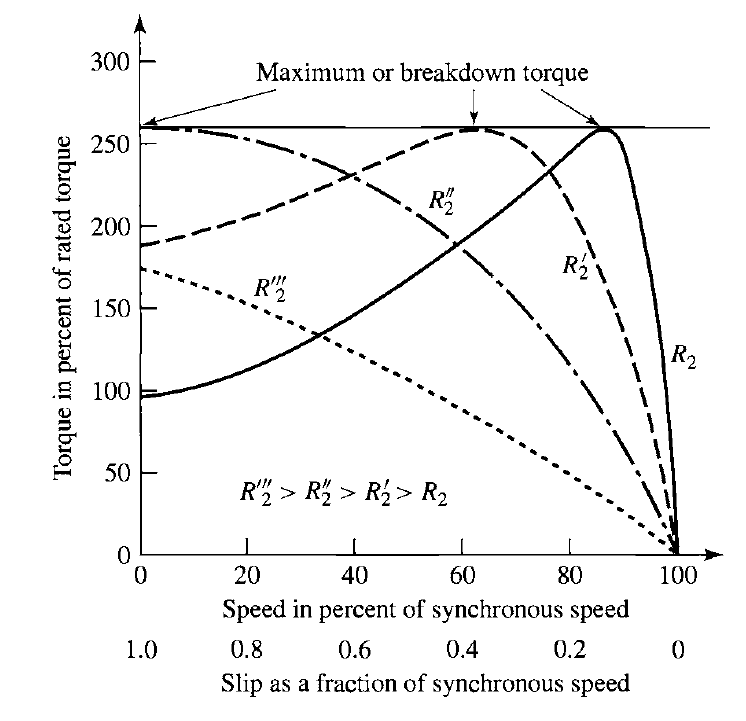
توجه کنید گشتاور ماکزیمم به مقاومت روتور بستگی ندارد و فقط گشتاور راه اندازی تغییر می کند. با استفاده از این خاصیت می توان موتور القایی را با مقاومت زیاد روتور (گشتاور راه اندازی بزرگ) راه اندازی کرده و سپس با کاهش مقاومت روتور (بدلیل ایجاد تلفات اهمی در شرایط کار دائمی) به نقطه کار رسید. همان طور که از روابط مشخص است جریان راه اندازی بخاطر لغزش بزرگ، حدود 5 الی 7 برابر جریان نامی موتور می باشد که ممکن است به سیم پیچی موتور آسیب برساند. برای کاهش جریان راه اندازی در موتورهای قفسه سنجابی، از قفسه های دوبل استفاده می شود. ساختار این قفسه ها و مدار معادل موتور با این قفسه ها بصورت زیر است:
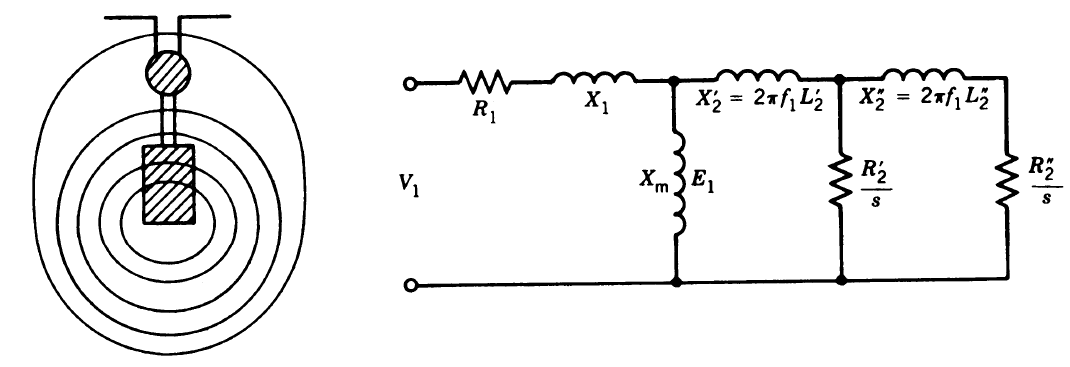
ساختار این قفسه ها طوری است که مقاومت قفسه بیرونی بیشتر از مقاومت قفسه داخلی و راکتانس قفسه بیرونی کمتر از راکتانس قفسه داخلی می باشد. بنابراین در لحظه راه اندازی بیشتر جریان روتور از قفسه خارجی که مقاومتش بیشتر است عبور کرده و در حالت کار دائمی جریان از هر دو قفسه عبور می کند.
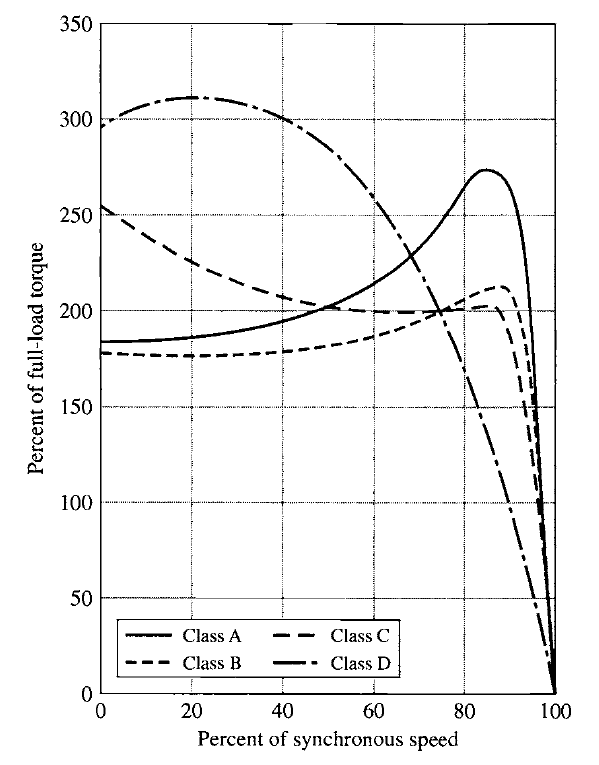
با استفاده از قفس دوبل و میله های عمیق روتور می توان موتور های القایی قفسه سنجابی با مشخصه های مختلفی طراحی کرد. بطور کلی موتورهای القایی قفسه سنجابی به چهار نوع تقسیم می شوند که هر کدام دارای مشخصه گشتاور متفاوتی می باشند:
راهاندازی موتور القایی
همانطور که گفته شد در موتورهای القایی رابطهای مستقیم بین مقدار لغزش و مقدار جریان القایی در روتور وجود دارد. به این ترتیب بیشترین میزان جریان القایی در روتور در هنگام راهاندازی به وجود میآید. در این حالت موتور مانند ترانسفورماتوری عمل خواهد کرد که سیمپیچ ثانویه آن اتصال کوتاه شده باشد. بالا بودن جریان القا شده در روتور موجب بالا رفتن جریان استاتور میشود و به همین دلیل میزان جریان راهاندازی در استاتور تقریبا بین ۵ تا 7 برابر جریان در بار کامل است. جریان بالای موتور در لحظه راهاندازی میتواند باعث افت ولتاژ در بقیه مصرف کننده شود اما این جریان بالا در موتور زیاد ادامه پیدا نمیکند چون با راه افتادن موتور لغزش به تدریج کاهش یافته و میزان جریان استاتور نیز کاهش مییابد. در صورتی که بار موتور در لحظه راهاندازی به اندازهای باشد که موتور قادر به چرخش نباشد جریان بالا موجب سوختن سیمپیچ استاتور خواهد شد. برای جلوگیری از افزایش بیش از حد جریان در موتور از روش های مختلفی استفاده می کنند که عبارت اند از:
-
استفاده از مقاومت خارجي روتور (در مورد موتورهاي روتورسيم پيچي شده)
-
استفاده از روش اتصال ستاره مثلث
-
استفاده از اينورتر(Soft Starter)
-
استفاده از اتوترانس
با استفاده از برنامه زیر می توانید با وارد کردن مشخصات موتور منحنی گشتاور و پارامترهای ولتاژ و جریان را محاسبه کنید.
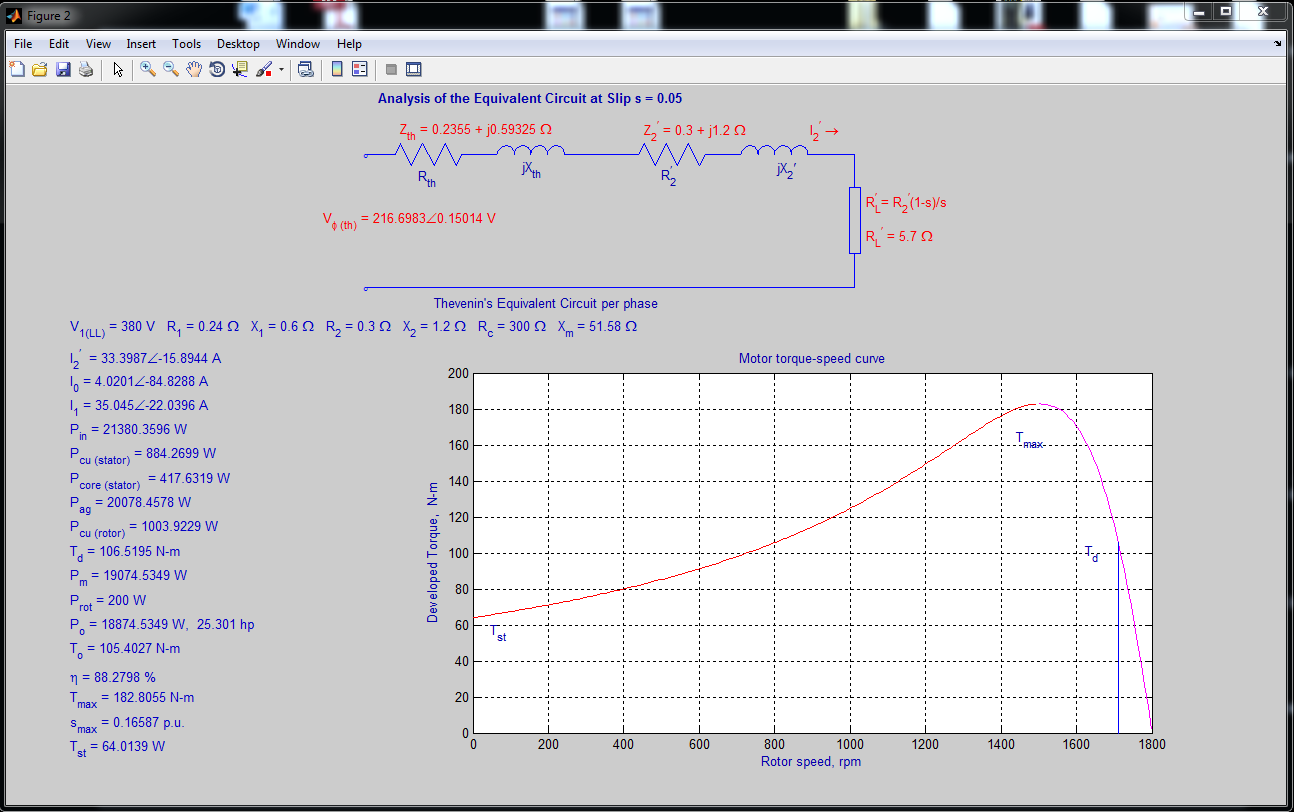
برای دانلود برنامه بر روی عکس زیر کلیک کنید.




35 Comments
mahdi
درباره10 سال agoسلام این برنامه با نرم افزاری باز می شود با متلب نمی توان آن را باز کرد.
پاسخAdmin
درباره10 سال agoابتدا فایل Induction Motor Analysis GUI.mlappinstall را گرفته و داخل محیط متلب بیندازید سپس از قسمت Apps روی گزینه Induction Motor Analysis GUI کلیک کنید تا برنامه اجرا شود
پاسخmahdi
درباره10 سال agoبا سلام رفرینس قسمت راهاندازی موتور القایی می خواستم چون برای جلوگیری از افزایش بیش از حد جریان روش های نام برده اید ولی توضیحاتی در مورد آنها نداده اید ؟
پاسخAdmin
درباره10 سال agoاگر از اینورتر استفاده نمی کنید کتاب زیر مرجع مناسبی می باشد:
Electric Machines by D.P.Kothari & I.J.Nagrath
کتاب آقای مهرداد عابدی (ماشین القایی) نیز مناسب می باشد
اگر هم از اینورتر استفاده می کنید کافی است فرکانس ورودی را آرام افزایش دهید
پاسخmohammad reza
درباره10 سال agoسلام سایت خیلی خوبی دارید که جا دارد بهتر شود مثلاجای شبیه سازی موتور های تکفاز القایی این جا خالیه. يک سوالي از کتاب پ.س.سن فصل ماشين هاي القايي تکفاز، قسمت گشتاور راه اندازي داشتم. اگر ممکن است من را راهنمایی کنید. 1. چرا گشتاور ناشي از شار اصلي استاتور و جريان القايي ناشي از آن در روتور صفر مي باشد؟ که البته اين کار را براي گشتاور ناشي از شار کمکي استاتور و جريان ناشي از آن در روتور هم کرده. البته در صفحات اوليه اين مبحث دليل عدم وجود گشتاور راه اندازي را قانون لنز دانسته . اما سوال اصلي اين است که اين جا زاويه بين دو بردار ميدان 180درجه نيست(موتور القایی تکفاز در حالت ساکن مثل ترانس اتصال کوتاه عمل می کند) و طبق فرمول ، گشتاور متناسب با سينوس زاويه ي بين دو بردارميدان مغناطيسي است در نتيجه گشتاور راه اندازي خواهيم داشت. 2.چرا فرمول استفاده شده در اين جا براي محاسبه ي گشتاور، گشتاور را متناسب با کسينوس زاويه بين جريان و شار گرفته؟ (در صورتي که مي دانيم شار و جريان و بردار ميدان مغناطيسي با هم، هم جهت مي باشند و طبق فرمول،گشتاور متناسب با سينوس زاويه ي بين دو ميدان مغناطيسي است.) 3. چرا گشتاور ناشي از شار سيم پيچ اصلي و جريان القايي در روتور ناشي از سيم پيچ کمکي را ساعتگرد گرفته و گشتاور ناشي از شارسيم پيچ کمکي و جريان القايي در روتور ناشي از سيم پيچ اصلي را پادساعتگرد گرفته است؟ که البته اين کار با فرض پاسخ دان به قسمت قبل يعني متناسب بودن گشتاور با کسينوس زاويه ي بين دو بردارميدان مغناطيسي قابل توجيه خواهد بود. متشکرم.
پاسخAdmin
درباره10 سال agoچیزی که باعث حرکت یک موتور می شود mmfگردان می باشد و همان طور که از شکل 7.1 کتاب مشخص است شار ایجاد شده در این موتور فقط در یک راستا می باشد و کم وزیاد می شود ولی نمی چرخد
طبق قانون لنز شار ایجاد شده در روتور باید مخالف شار استاتور باشد بدین معنی که وقتی شار استاتور به سمت پایین است شار روتور به سمت بالا است برای همین زاویه بین دو شار همیشه در حالت ساکن 180 درجه می باشد و همانطور که خودتان گفتید گشتاور حاصلضرب شارها در سینوس بین آنها می باشد پس گشتاور راه اندازی در موتور تکفاز صفر می باشد.
راجع به سوال دوم هم به شکل 7.3 اگر نگاه کنید زاویه تتا را از pi/2 گرفته بنابراین اگر از صفر می گرفت فرمولها را می شد با سینوس نوشت و فرقی نمی کرد.
راجع به سوال سوم هم باید بگویم که برای تحلیل گشتاور ماشین تک فاز آن را می توان به دو گشتاور ساعتگرد و پادساعتگرد مدل کرد چون مشکل در راه اندازی موتور است ابتدا با روش هایی روتور را میچرخانند و سپس سیم پیچی کمکی را حذف می کنند مثال 7.3 بنظرم می تواند کمکتان کند.
پاسخmohammad reza
درباره10 سال agoسلام خیلی ممنون که وقت گذاشتید . فکر کنم سوالم رو درست مطرح نکردم. دیاگرام فازوری شکل 14.7 و روابط استفاده شده برای محاسبه گشتاور راه اندازی مورد سوال است.(هر سه سوال) این هایی که گفته اید را قبول دارم اما من در صورت سوال اول گفته ام: اما سوال اصلی این است که این جا زاویه بین دو بردار میدان ۱۸۰درجه نیست(موتور القایی تکفاز در حالت ساکن مثل ترانس اتصال کوتاه عمل می کند) و طبق فرمول ، گشتاور متناسب با سینوس زاویه ی بین دو بردارمیدان مغناطیسی است در نتیجه گشتاور راه اندازی خواهیم داشت. و در سوال دوم : چرا فرمول استفاده شده در این جا برای محاسبه ی گشتاور، گشتاور را متناسب با کسینوس زاویه بین جریان و شار گرفته؟ (در صورتی که می دانیم شار و جریان و بردار میدان مغناطیسی با هم، هم جهت می باشند و طبق فرمول،گشتاور متناسب با سینوس زاویه ی بین دو میدان مغناطیسی است.) و فکر می کنم سوال سوم هم با پاسخ دادن به سوال دوم حل می شود. متشکرم
پاسخAdmin
درباره10 سال agoمن تصور کردم که سوال شما راجع به موتور تکفاز شکل 7.1 می باشد.شکل 7.14 در اصل درست است که با یک فاز هر دو سیم پیچی تغذیه می شوند ولی می توان گفت که در اصل یک موتور دو فاز می باشد که جریان های آن با اختلاف فاز آلفا تغذیه می شود.بنابراین باید هم گشتاور راه اندازی تولید شود.
راجع به سوال دوم هم باید بگویم که طبق دیاگرام فازوری 7.14 گشتاور سیم پیچی اصلی برابر است با ضرب دو بردار شاراصلی و بردار جریان سیم پیچی کمکی که روی یک راستا تصویر شده باشند بخاطر همین نوشته کسینوس.توجه کنید که اندازه شار و جریان و بردار مغناطیسی با هم متناسب است نه فازور آنها مثلا از قانون لنز داریم که ولتاژ القا شده برابر است با منفی مشتق شار.و این یعنی که ولتاژ القا شده 90 درجه عقب تر از شار می باشد.می توان جواب سوال دوم تان را این طور نیز بیان کرد که جریان I2a به اندازه تتا از ولتاژ القا شده عقب تر است و چون خود ولتاژ القا شده 90 درجه از شار عقب تر است پس می توان رابطه سینوس را به کسینوس تبدیل کرد.
پاسخmohammad reza
درباره10 سال agoسوالم رو واضح تر میکنم. بالای همین شکل یک سری روابط ریاضی و 4 تا جمله برای بررسی چهار اثر متقابل دو شار و جریان اصلی و کمکی نوشته است. 1. در حالی که زاویه ی بین شار اصلی و جریان القایی ناشی از شار اصلی در موتور القایی تکفاز در حال سکون (در دیاگرام فازوری شکل 7.14)180 نیست گشتاور حاصل از آن را صفر گرفته. در حالی که زاویه ی بین شار کمکی و جریان القایی ناشی از شار کمکی در موتور القایی تکفاز در حال سکون (در دیاگرام فازوری شکل 14.7)180 نیست گشتاور حاصل از آن را صفر گرفته. البته این استدلال را برای موتور القایی تکفاز در حال سکون که فقط سیم پیج اصلی دارد(تکفاز خالص خالص! سیم پیچ کمکی ندارد) و دیاگرام فازوری آن هم دقیقا مثل شکل 14.7 که همان دیاگرام فازوری برای ترانس اتصال کوتاه است داشت. که طبق فرمول معروف گشتاور: (T=k.Bs . Br . sin(Bs, Br سوال اصلی این است که طبق دیاگرام فازوری گفته شده زاویه بین شار و جریان 180 نیست و طبق رابطه گتاوری که در بالا نوشتم ما برای موتور القایی تکفاز خالص خالص! در حال سکون گشتاور راه اندازی خواهیم داشت. که پاراگرافی که در بالا نوشتم با قانون لنز که می گوید گشتاور راه اندازی به دلیل 180 درجه بودن بین زاویه شار استاتور و شار روتور در لحظه ی سکون صفر می باشد و ما هم قبول داریم در تناقض است. چه اشکالی در این استدلال وجود دارد؟ 2. فرمولی که پایین این چهار تا جمله نوشته می گوید که: یک مولفه(ساعتگرد) گشتاور راه اندازی با اندازه ی شار اصلی و اندازه ی جریان القایی ناشی از سیم پیچ کمکی در روتور و *کسینوس زاویه ی بین شار اصلی و جریان القایی ناشی از سیم پیچ کمکی در روتور(که در دیاگرام فازوری شکل 14.7 آمده)* متناسب است. خوب سوال من این است که تا حالا ما هرجا صحبت از گشتاور می کردیم می گفتیم که گشتاور متناسب با سینوس زاویه ی بین دو میدان است ولی ای جا یکدفعه و بدون هیچ توضیحی کسینوس زاویه بین دو میدان نوشته! اگر گشتاور متناسب با کسینوس زاویه بین دو میدان باشد که چون کسینوس 180 ، (-1) می شود گشتاور راه اندازی در موتور القایی تکفاز خالص خالص خواهیم داشت. سوال سوم که مربوط به جهت گشتاور حاصل (جمله های 1 و 2) با پاسخ به سوال 2 حل می شود. ---------------------------------------------- می دانیم که بردارهای فازوری جریان و شار و میدان مغناطیسی ناشی از همان جریان با هم هم جهت می باشند. ----------------------------------------------- این سوال رو من تا حال (نزدیک 20 روز ) از چند نفر پرسیدم و در چند تا از تالارهای برق مطرح کردم که تا حالا کسی به آن پاسخی نداده. لطفا مرا راهنمایی کنید متشکرم.
پاسخAdmin
درباره10 سال agoبنظرم شما زوایای مکانی را با زمانی اشتباه گرفته اید.رابطه ای که اشاره کردید می گوید که گشتاور با اندازه شار (که می تواند خود با زمان تغییر کند) و سینوس زاویه مکانی بین دو شار متناسب است. اگر به شکل 7.14a نگاه کنید شار اصلی با شاری که سیم پیچی ab تولید می کند طبق قانون دست راست 180 درجه مکانی متفاوت می باشند. بنابراین باید هم گشتاوری تولید نشود. ولی همین شار اصلی با شار سیم پیچی cd 90 درجه مکانی اختلاف فاز دارند بنابراین باید گشتاور تولید شود. پس توجه کنید که گشتاور با سینوس زاویه مکانی بین دو میدان رابطه دارد.برای همین است که گشتاور راه اندازی در موتور القایی تک فاز نداریم چون سیم پیچی عمود بر هم نداریم.
راجع به سوال دوم هم باید بگویم که رابطه نوشته شده با کسینوس مربوط به رابطه زاویه مکانی نیست بلکه مربوط به زاویه زمانی می باشد.همان طور که گفته شد گشتاور با اندازه شارها که ممکن است با زمان تغییر کند متناسب می باشد و این بدین معنی است که تصویر جریان سیم پیچی cd که روی محور شار اصلی می باشد گشتاور را تولید می کند.
پاسخmohammad reza
درباره10 سال agoاین رابطه ی کسینوس قبلا کجا بوده همیشه ما سینوس زاویه زمانی بین همین دو بردار رو می نوشتیم. بعد اینکه اگر این کسینوس همون سینوس است (که باید مشخص شود چطوری) قسمت قبل که گفتیم زاویه مکانی 180 است. ولی این جا برای زاویه ی زمانی داریم از آن استفاده می کنیم.(قبلا هم اشاره کرده بودم) لطفا منو راهنمایی کنید.
پاسخAdmin
درباره10 سال agoاگر بردار جریان القایی سیم پیچی کمکی را روی محور شار اصلی و محور عمود بر آن تصویر کنید مقدار بردار جریان که همراستا با شار اصلی می باشد با کسینوس زاویه بین آن دو را بطه دارد.
فکر نمی کنم این کسینوس همان سینوس باشد تا آنجا که از مغناطیس یاد دارم گشتاور برابر بود با حاصل ضرب خارجی شارها.
در آنجا زاویه مکانی بین دو شار مدنظر بود.
پاسخmohammad reza
درباره10 سال agoسلام حل شد متشکرم.
پاسخmohammad reza
درباره10 سال agoسلام دوباره از اینکه دوباره مزاحم می شم عذرخواهی می کنم می خواستم درباره ی تئوری میدان عرضی در موتور القایی تکفاز منو راهنمایی کنید. من این تئوری رو از روی کتاب چاپمن و کتاب مباحث تکمیلی دکتر لسانی خوندم ولی متوجه نشدم مثلا توی کتاب چاپمن اگه به اولین شکل این بحث نگاه کنید با توجه به قانون دست راست جهت جریان روتور رو اشتباه گرفته و این که گفته ولتاژ ماکزیمم روتور در برابر سیم پیچی های استاتور خواهد بود(چرا؟) از هر دو تا شکل این کتاب تقریبا هیچی نفهمیدم. بعد این که ما در موتور القایی تکفاز ، اندازه ی دامنه میدان برایند در موتور القایی تکفاز ثابت نیست و این که ولتاژ القایی در روتور فقط سرعتی نیست لطفا مرا راهنمایی کنید متشکرم
پاسخمیثم
درباره10 سال agoسلام و خسته نباشید یه سوال فنی داشتم برای یه طرح پیشنهادی که از یک موتور Dc باید استفاده کنم که از ارتفاع 10 متر یک پمپ آب را باید به حرکت در بیاورد میخواستم بدونم شما برای این طرح موتور Dc با مشخصات خاصی را سراغ دارید معرفی کنید فقط از این موضوع مطمئنم که موتور مورد نظر باید توانایی گشتاور بالای داشته باشد. با تشکر.
پاسخAdmin
درباره10 سال agoحالا چرا موتور DC؟
موتور القایی هم راندمان بیشتر و هم تو بازار راحت تر گیر میاد.
پاسخمیثم
درباره10 سال agoسلام ممنون از جوابتان من این موضوع رو اضافه میکنم میخوام از یه موتور -پمپ dc12 یا 24 ولت استفاده کنم تا خطر برق گرفتگی رو به حداقل برسونم
پاسخAdmin
درباره10 سال agoپمپ های آب دارای یک مشخصه کارکرد هستند (بر حسب ارتفاع آب) اگر یه سرچی تو اینترنت بزنید روش انتخاب را هم براتون توضیح داده اند.
پاسخhamid
درباره9 سال agoبا عرض سلام من یک موتور تکفاز را تجدید سیم پیچی کردم که بعد از آن موفق به راه اندازی نشدم با تغییر سربندی به موازی و سربندیهای دیگر باز هم راه اندازی نشد هنگامی که با کمک راه اندازی میشود در حین کار آمپر الکتروموتور خوب است در داخل جعبه کلم یک عدد مقاومت ۱۰ کیلو اهم قرار داره که اونو از مدار خارج کرده بودم امکان داره عدم راه اندازی از مقاومت باشه اگه از مقاومته بایستی چطوری سر سیم ها رو بهم اتصال بدم موتور تکفاز سیم پیچ اصلی ۴قطب با راه اندازی ۲ قطب میباشد
پاسخAdmin
درباره9 سال agoاطلاعی در این باره ندارم.
پاسخامیر
درباره9 سال agoسلام.من منجنی عکس العمل آرمیچر بر حسب جریان بار در مولد شنت رو لازم دارم واسه پروژه.میتونین کمکم کنین؟ممنون
پاسخAdmin
درباره9 سال agoدر کتاب موتورهای دی سی مربوط به هنرستان یک منحنی عکس العمل آرمیچر بر حسب بار وجود دارد.
پاسخامیر
درباره9 سال agoضمن تشکر کجا میتونم این کتاب رو دریافت کنم؟لینک دارین؟
پاسخAdmin
درباره9 سال agoکافی است که در گوگل کلمه کتاب موتور دی سی مرکز چاپ آموزش و پرورش را جستوجو نمایید.
پاسخhamid
درباره9 سال agoممنون از سایت پربارتون مهندس!!!
پاسخمحمد علی زینلی
درباره8 سال agoبا سلام برای چرخش یک پالت بوسیله ی یک سروو موتور باید رابطه ی مکانیکی T=36.5a بین گشتاور مکانیکی و شتاب زاویه ای برقرار باشد ، اگر قرار باشد پالت در 5 ثانیه 180 درجه با سرعت زاویه ای ثابت بچرخد ، مقدار شتاب زاویه ای و در نتیجه گشتاور چگونه تعیین می شود ؟ با توجه به این که گشتاور از پارامتر های اصلی انتخاب موتور است آیا شتاب زاویه ای باید با توجه به پارامتر های موتور انتخاب شود؟ با تشکر ،
پاسخAdmin
درباره8 سال agoاگر سرعت زاویه ای ثابت باشد حتماً شتاب زاویه ای صفر خواهد بود چرا که شتاب مشتق سرعت می باشد:
a=dV/dt
راجع به انتخاب شتاب زاویه ای هم باید گفت که چون زمان راه اندازی موتورها تا رسیدن به مقدار سرعت نامی شان متفاوت است بنظرم باید به هندبوک های مربوطه مراجعه کنید. پست زیر نیز مناسب خواهد بود:
https://motodrive.ir/%d9%85%d8%ad%d8%a7%d8%b3%d8%a8%d9%87%e2%80%8c%db%8c-%d8%b2%d9%85%d8%a7%d9%86-%d8%b1%d8%a7%d9%87-%d8%a7%d9%86%d8%af%d8%a7%d8%b2%db%8c-%d9%85%d9%88%d8%aa%d9%88%d8%b1%d9%87%d8%a7%db%8c-%d8%a7%d9%84%d9%82
پاسخامیرعلی
درباره7 سال agoسلام کد متلب این برنامه رو ندارید؟
پاسخAdmin
درباره7 سال agoابتدا برنامه بالا را دانلود کرده و روی matlab نصب نمایید و سپس با وارد کردن مشخصات موتور منحنی آن را بدست آورید.
پاسخsadegh
درباره7 سال agoبا سلام...من دو پروژه متلب دارم انجام میدم در مورد قطع یکفاز رتور وقطع یک فاز استاتور....همه کارا رو کردم ....برای رتورthree phase breaker را یک سمت اتصال کوتاه کردم و سمت دیگر را به موتور وصل کردم و فاز a را قطع کردم اما منحنی ها را نمایش نمیدهد خواستم بپرسم که اشکال از کجاست
پاسخAdmin
درباره7 سال agoلطفاً فایل خود را ارسال نمایید تا بررسی گردد.
پاسخsadegh
درباره7 سال agoمیشه بپرسم کجا میتونم ارسال کنم فایل رو
پاسخAdmin
درباره7 سال agoسلام
به آدرس
admin@motodrive.ir
ایمیل کنید.
پاسخمهرداد
درباره7 سال agoسلام. ببخشید میخواستم بپرسم که چطور میشه راندمان یک موتور القایی دو مگا وات یازده کیلو ولت رو با توجه به تعداد دور و توان ورودی ماشین که اندازه گیری کردیم بدست بیاریم؟
پاسخAdmin
درباره7 سال agoهمانطور که میدانید برای محاسبه راندمان باید توان ورودی و توان خروجی را داشته باشید. چون توان ورودی را محاسبه کرده اید باید توان خروجی را نیز به گونه ای محاسبه کنید. اگر بتوانید به گونه ای گشتاور خروجی موتور را اندازه گیری کنید مقدار توان خروجی برابر می شود با ضرب سرعت در گشتاور. اگر گشتاورسنج داشته باشید می توانید این کار را انجام بدید. اگر هم پارامترهای موتور را داشته باشید می توانید از روابط موجود مقدار تلفات را محاسبه کرده و توان خروجی را بدست آورید.
پاسخ