طراحی یک کنترل کننده فازی برای کنترل یک سروموتور DC با Matlab
در این قسمت نحوه طراحی یک کنترل کننده فازی برای کنترل یک سروموتور DC با Matlab را آموزش می دهیم. فرض کنید تابع تبدیل یک سروموتور DC بصورت زیر است:
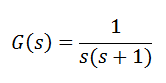
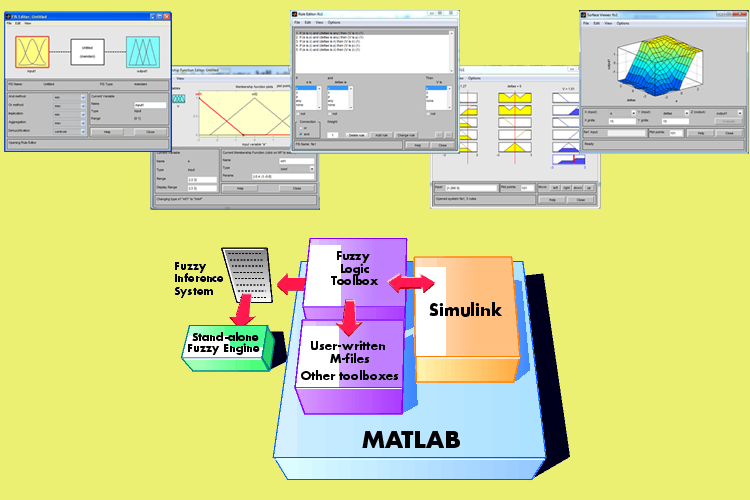
در این قسمت نحوه طراحی یک کنترل کننده فازی برای کنترل یک سروموتور DC با Matlab را آموزش می دهیم. فرض کنید تابع تبدیل یک سروموتور DC بصورت زیر است:
مفاهیم منطق فازی (fuzzy logic) اولین بار به وسیله پروفسور لطفی زاده ارائه شد و سپس توسط دیگران گسترش یافت.ریاضیات محض بخودی خود اهمیت چندانی ندارد بلکه نحوه کاربرد آن در صنعت اهمیت دارد.منطق فازی نیز بیش از بیست سال پس از ۱۹۶۵ از درگاه دانشگاه ها به بیرون راه نیافت زیرا کمتر کسی معنای آنرا درک کرده بود. در اواسط دهه ۸۰ میلادی قرن گذشته صنعتگران ژاپنی معنا و ارزش صنعتی این علم را دریافته و منطق فازی را به کار گرفتند. اولین پروژه آنها طرح هدایت و کنترل تمام خودکار قطار زیرزمینی شهر سندای بود که توسط شرکت هیتاچی برنامه ریزی و ساخته شد.از این پس منطق فازی بسیار سریع در تکنولوژی دستگاه های صوتی و تصویری ژاپنی ها راه یافت (از جمله نلرزیدن تصویر فیلم دیجیتال ضمن لرزیدن دست فیلم بردار).
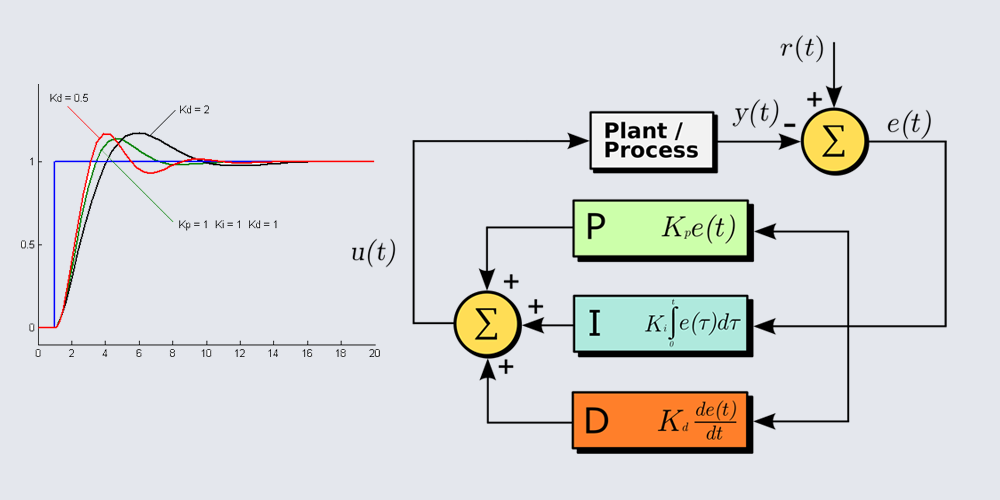
در كنترل كننده هاي مدرن صنعتي و همچنين بلوكهاي PID مربوط به PLC های مختلف صنعتي اين كنترل كننده بصورت ديجيتال پياده سازي مي شود. البته قدرت پياده سازي ميكروپروسسوري به كنترل كننده PID محدود نشده و انواع ديگر كنترل كننده هاي خطي و غيرخطي را مي توان توسط ميكروپروسسور پياده سازي نمود.در اينجا بصورت مقدماتي مباحث گسسته سازي كنترل كننده ها بيان گرديده و محور بحث را بر روي كنترل كننده PID قرار مي دهيم.
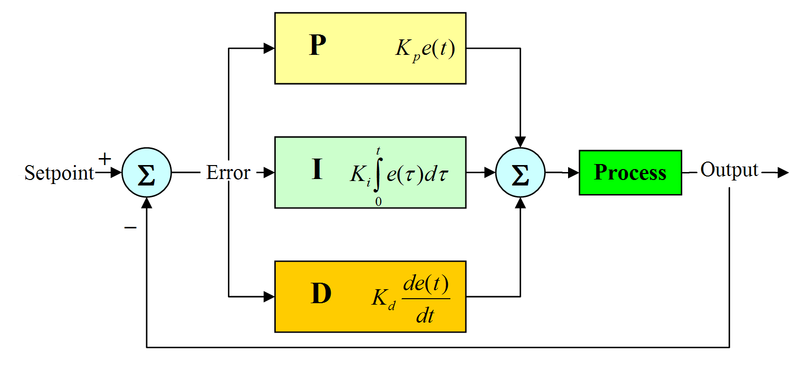
در بسياري از فرآيندهاي صنعتي از كنترل كننده تناسبي P يا تناسبي مشتق گير ،PDتناسبيانتگرال گير PI و يا كنترل كننده تناسبي– مشتق گير– انتگرال گير ،PIDبه عنوان ساختاراصلي كنترل كننده استفاده مي شود. هدف از استفاده از حلقه فيدبك و كنترل كننده را می توان بصورت زير خلاصه کرد:

سایت موتودرایو در جهت آموزش مطالب رشته برق راه اندازی شده است. هدف این سایت تولید محتوای تخصصی برای دانشجویان علاقه مند به رشته برق بوده و همچنین در راستای آموزش برنامه نویسی نرم افزار متلب و کاربرد آن در رشته برق قدم بر داشته است.


